6.6.3 VAE Basics [Optional]
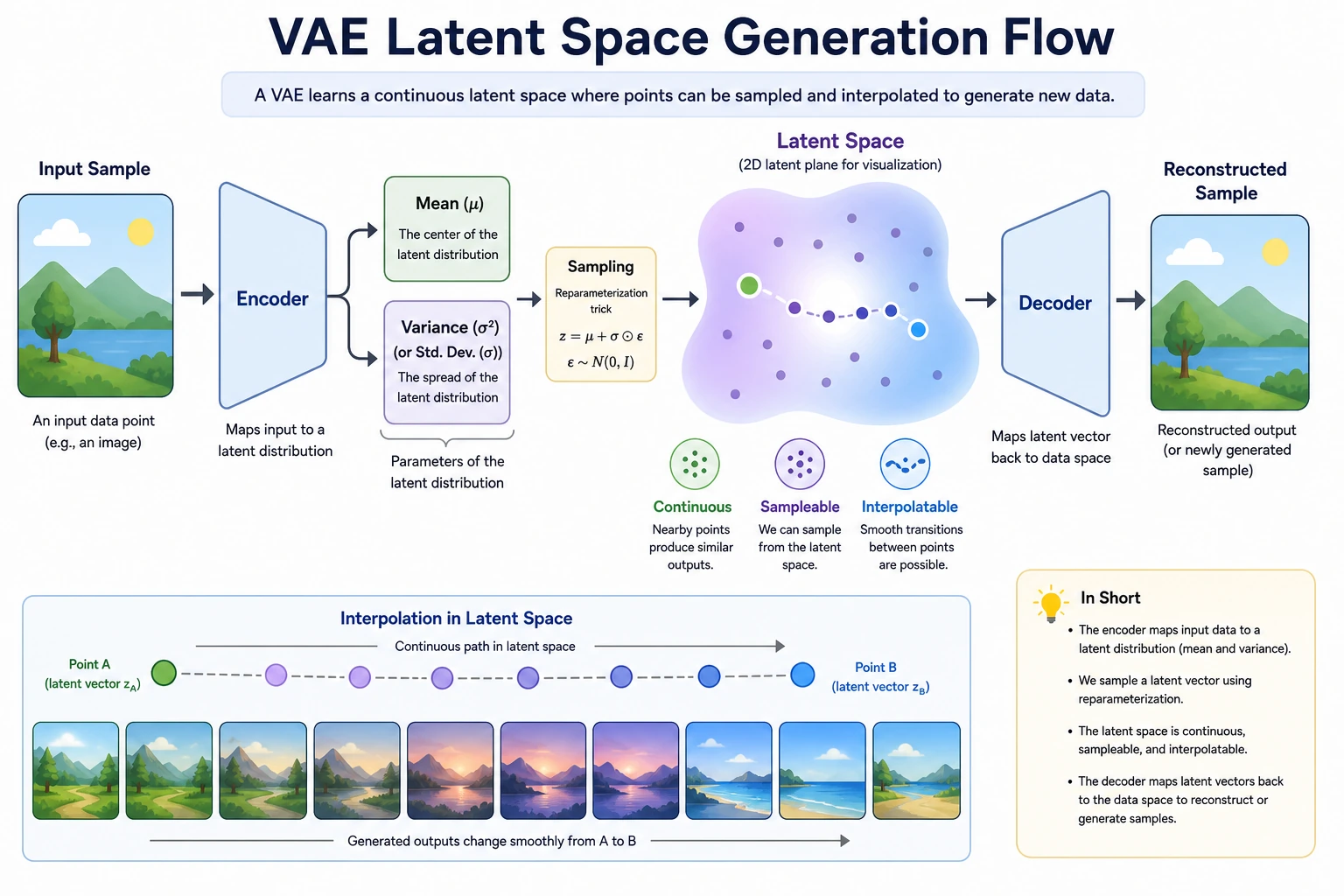
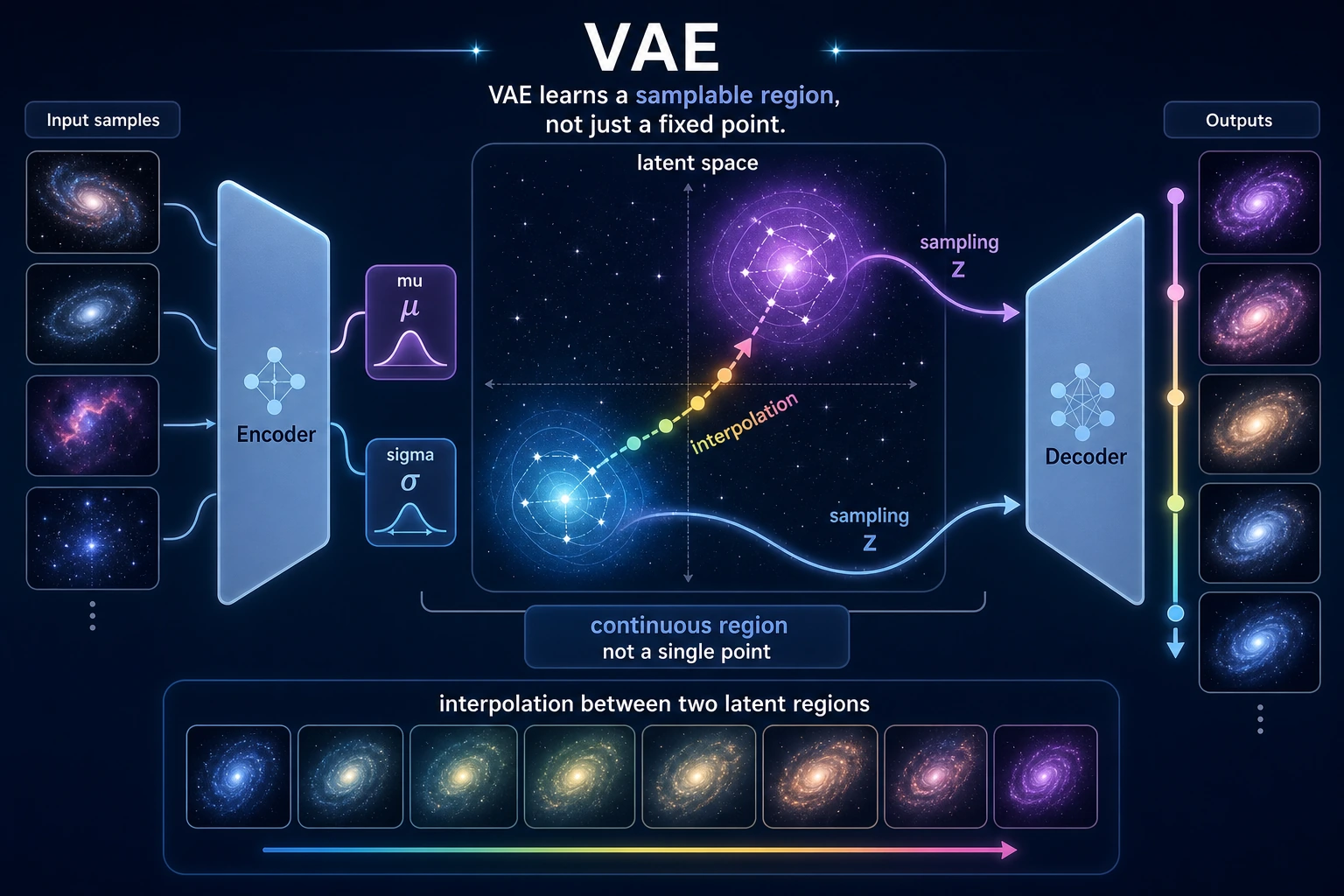
A VAE is a generative autoencoder. Instead of compressing each input into one fixed point, it learns a small distribution in latent space, samples from it, and decodes the sample back into data.
Learning Objectives
- Explain the encoder,
mu,logvar, latent samplez, and decoder. - Understand why VAE uses reparameterization.
- Run a tiny PyTorch VAE on 2D points.
- Read reconstruction loss and KL regularization.
- Compare VAE with a standard autoencoder and GAN.
See the Flow First
| Step | What happens | Practical meaning |
|---|---|---|
| Encode | x -> mu, logvar | describe a latent region |
| Sample | z = mu + eps * std | make sampling differentiable |
| Decode | z -> reconstructed x | turn latent code back into data |
| Regularize | KL term | keep latent space smooth and samplable |
The key difference from a normal autoencoder:
Autoencoder: x -> one latent point -> reconstruction
VAE: x -> latent distribution -> sample z -> reconstruction or generation
Why Reparameterization Exists
Sampling is random. Random sampling by itself blocks straightforward backpropagation. VAE rewrites sampling as:
std = exp(0.5 * logvar)
eps ~ N(0, 1)
z = mu + eps * std
Now gradients can flow through mu and std, while eps provides randomness.
The VAE Loss
VAE training usually combines two goals:
loss = reconstruction_loss + beta * KL(q(z|x) || p(z))
Read it in plain language:
- reconstruction loss: “can the decoder rebuild the input?”
- KL term: “is the latent space close to a smooth prior such as N(0, 1)?”
beta: how strongly you force the latent space to be regular.
Too little KL pressure can make the latent space messy. Too much KL pressure can hurt reconstruction or cause the latent variable to carry too little information.
Lab: Train a Tiny VAE on 2D Points
This is not an image VAE. It is a small runnable lab that exposes the full mechanics.
Create tiny_vae_2d.py:
import torch
from torch import nn
torch.manual_seed(4)
cluster_a = torch.randn(128, 2) * 0.15 + torch.tensor([1.0, 0.0])
cluster_b = torch.randn(128, 2) * 0.15 + torch.tensor([-1.0, 0.0])
x = torch.cat([cluster_a, cluster_b], dim=0)
class TinyVAE(nn.Module):
def __init__(self):
super().__init__()
self.encoder = nn.Sequential(nn.Linear(2, 16), nn.ReLU())
self.mu = nn.Linear(16, 2)
self.logvar = nn.Linear(16, 2)
self.decoder = nn.Sequential(nn.Linear(2, 16), nn.ReLU(), nn.Linear(16, 2))
def reparameterize(self, mu, logvar):
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return mu + eps * std
def forward(self, x):
h = self.encoder(x)
mu = self.mu(h)
logvar = self.logvar(h)
z = self.reparameterize(mu, logvar)
recon = self.decoder(z)
return recon, mu, logvar
model = TinyVAE()
opt = torch.optim.Adam(model.parameters(), lr=0.02)
for epoch in range(1, 201):
recon, mu, logvar = model(x)
recon_loss = ((recon - x) ** 2).mean()
kl = -0.5 * torch.mean(1 + logvar - mu.pow(2) - logvar.exp())
loss = recon_loss + 0.05 * kl
opt.zero_grad()
loss.backward()
opt.step()
if epoch in [1, 50, 100, 200]:
print(
f"epoch={epoch:03d} "
f"recon={recon_loss.item():.4f} "
f"kl={kl.item():.4f} "
f"loss={loss.item():.4f}"
)
with torch.no_grad():
z = torch.randn(5, 2)
samples = model.decoder(z)
rounded = [[round(v, 3) for v in row.tolist()] for row in samples]
print("generated_points")
print(rounded)
Run it:
python tiny_vae_2d.py
Expected output:
epoch=001 recon=0.5903 kl=0.0293 loss=0.5917
epoch=050 recon=0.0335 kl=0.9007 loss=0.0785
epoch=100 recon=0.0261 kl=0.8229 loss=0.0673
epoch=200 recon=0.0244 kl=0.7138 loss=0.0601
generated_points
[[1.075, -0.014], [-0.997, -0.001], [-1.118, -0.054], [0.553, 0.041], [0.74, 0.021]]
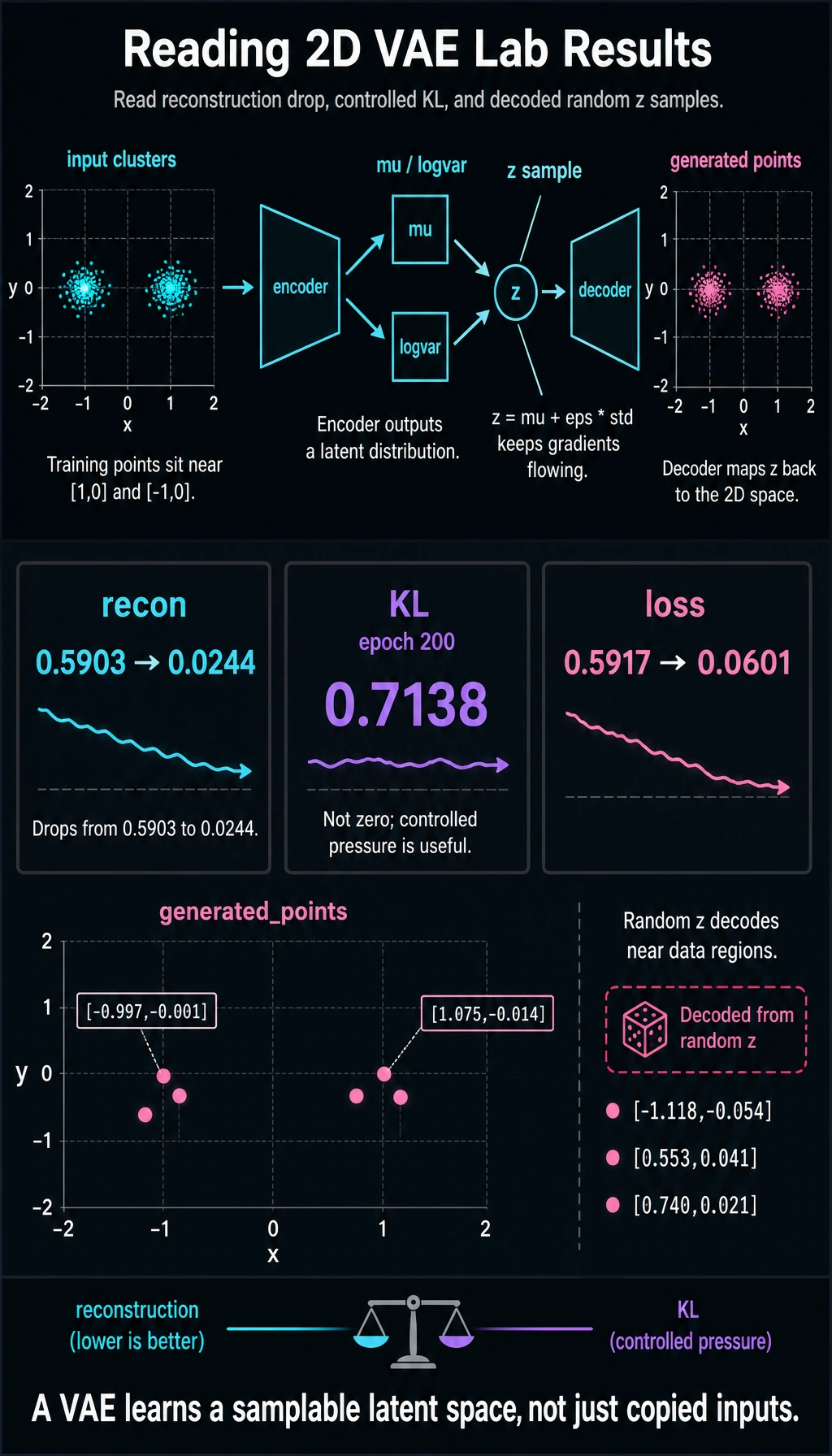
Read the output:
recondrops when the decoder learns to rebuild the 2D points.kldoes not need to become zero. It is a pressure toward a smooth latent prior.generated_pointsare decoded from randomz, not copied directly from training data.
VAE vs Autoencoder vs GAN
| Model | Learns | Strength | Typical weakness |
|---|---|---|---|
| Autoencoder | compact representation | reconstruction | latent space may not be easy to sample |
| VAE | distribution-shaped latent space | smooth sampling and interpolation | output can be blurry in image tasks |
| GAN | adversarial realism | sharp-looking samples | unstable training and mode collapse |
Practical Diagnostics
| Signal | Healthy direction | Warning sign |
|---|---|---|
| reconstruction loss | decreases and stabilizes | stays high |
| KL term | nonzero but controlled | collapses to zero or dominates loss |
| generated samples | plausible and diverse | all similar or meaningless |
| interpolation | changes smoothly | jumps or leaves data-like regions |
The common deep-learning tradeoff:
better reconstruction <-> more regular latent space
You tune that tradeoff with the KL weight, often called beta in beta-VAE.
Common Mistakes
| Mistake | Fix |
|---|---|
| thinking VAE is just autoencoder plus noise | focus on mu, logvar, KL, and a samplable latent space |
| ignoring reparameterization | remember z = mu + eps * std keeps gradients flowing |
| forcing KL too hard too early | consider smaller beta or KL warmup |
| judging only reconstruction | also inspect generated samples and interpolation |
| comparing VAE and GAN only by image sharpness | compare stability, latent structure, and task fit |
Exercises
- Change the KL weight from
0.05to0.0. What happens tokland generated samples? - Change the KL weight to
0.5. Does reconstruction get worse? - Decode points along a line from
[-2, 0]to[2, 0]. Do outputs change smoothly? - Replace
ReLUwithTanhin the decoder. Does training still converge? - Explain why VAE is useful for learning latent-space intuition even when GAN or diffusion produces sharper images.
Key Takeaways
- VAE learns a latent distribution, not just a fixed code.
- Reparameterization keeps sampling compatible with backpropagation.
- The KL term makes latent space smoother and more samplable.
- VAE is often easier to train than GAN, but may trade sharpness for structure.
- Understanding VAE makes later diffusion and representation learning easier.