6.4.3 LSTM and GRU
A plain RNN has memory, but that memory is easy to overwrite. LSTM and GRU add gates so the model can learn what to keep, what to forget, and what to expose as output.
Learning Objectives
- Explain why plain RNNs struggle with long dependencies.
- Understand LSTM cell state
c_tand hidden stateh_t. - Interpret forget, input, output, update, and reset gates.
- Run PyTorch
nn.LSTMandnn.GRUshape checks. - Train a tiny gated recurrent model on a memory task.
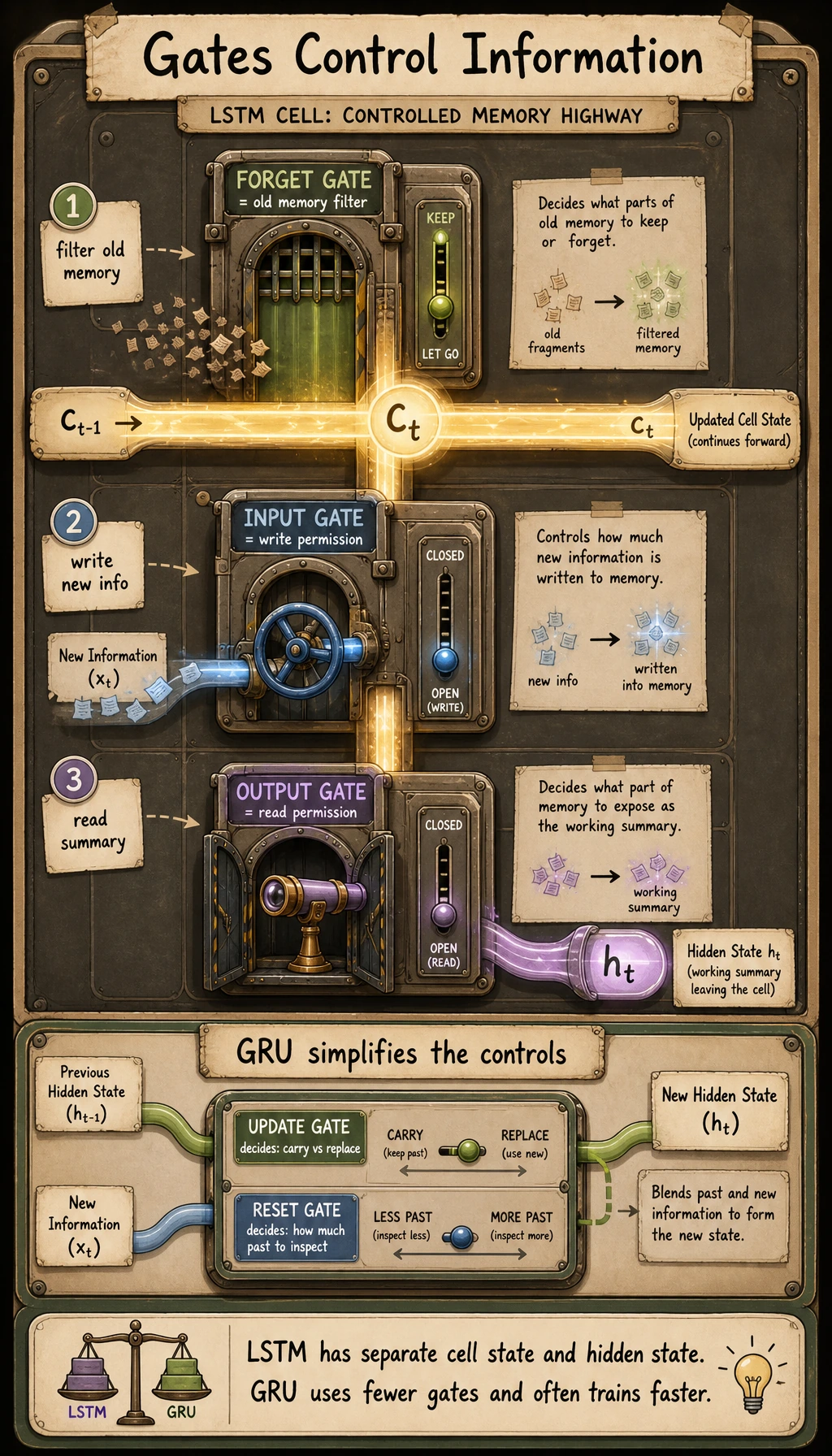
See the Gate Idea First
Read the picture like this:
old memory -> gate decides what stays -> new information enters -> output exposes part of memory
A gate is a learned value between 0 and 1.
| Gate value | Meaning |
|---|---|
close to 0 | mostly block the information |
close to 1 | mostly let the information pass |
This is the practical difference from a plain RNN: memory is no longer just overwritten at every step.
Why Plain RNN Is Not Enough
Plain RNNs summarize the past into one hidden state. That works for short sequences, but long sequences create two problems:
| Problem | Intuition |
|---|---|
| early information gets washed out | the hidden state is rewritten many times |
| gradients vanish | training signal becomes weak when backpropagated far back in time |
LSTM and GRU are not “deeper RNNs.” They are memory-control designs.
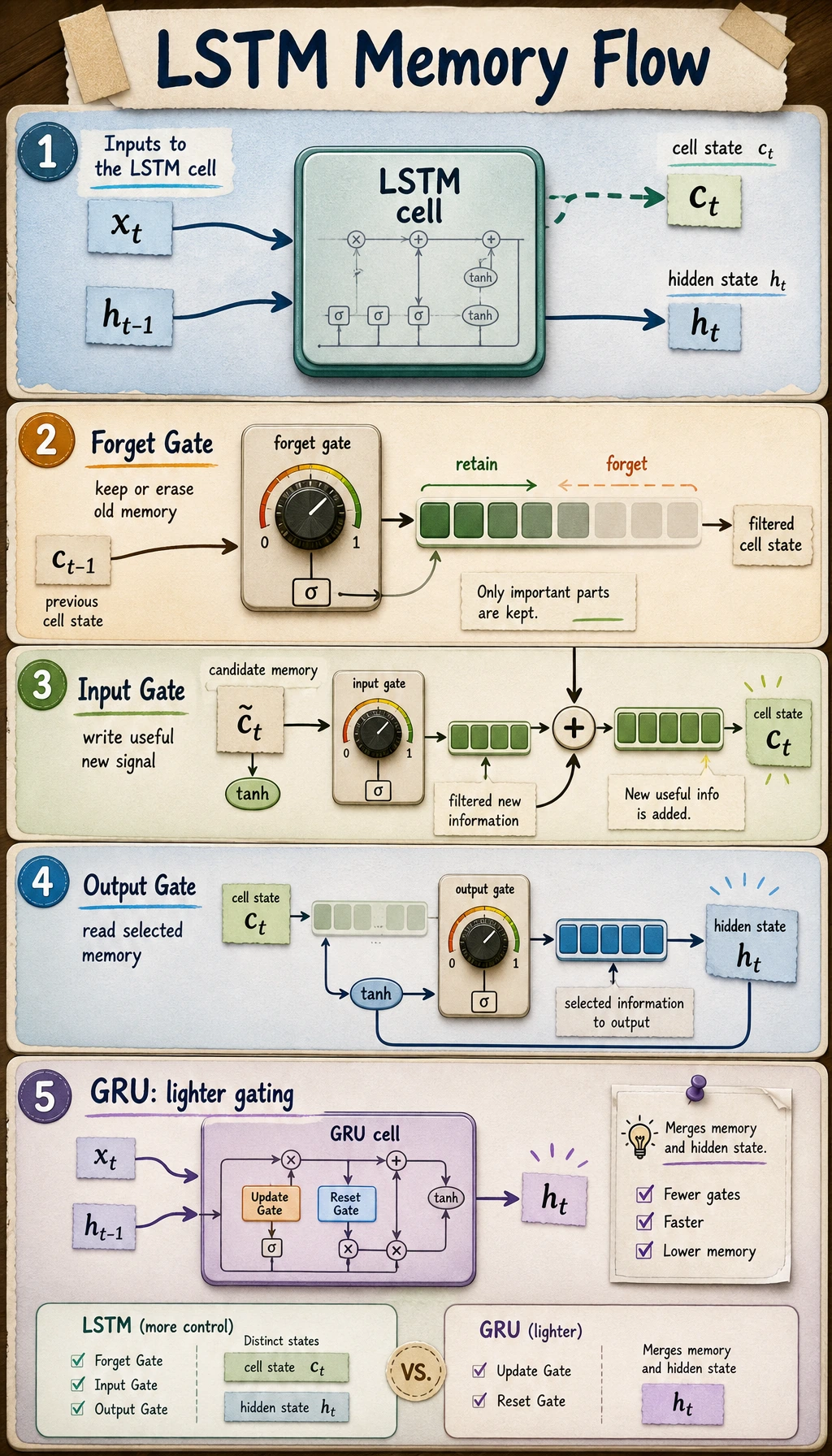
LSTM: Cell State Plus Three Gates
An LSTM keeps two states:
| State | Role |
|---|---|
c_t | cell state, the longer-term memory path |
h_t | hidden state, the output exposed at the current step |
The three main gates:
| Gate | Question it answers |
|---|---|
| forget gate | how much old memory should stay? |
| input gate | how much new information should be written? |
| output gate | how much memory should be exposed now? |
Lab 1: Scalar LSTM Gate Demo
This small scalar version keeps the idea visible without matrix notation.
import numpy as np
def sigmoid(x):
return 1 / (1 + np.exp(-x))
c_prev = 0.8
forget_gate = sigmoid(1.0)
input_gate = sigmoid(0.2)
output_gate = sigmoid(0.7)
c_tilde = np.tanh(0.9)
c_t = forget_gate * c_prev + input_gate * c_tilde
h_t = output_gate * np.tanh(c_t)
print("scalar_lstm_lab")
for name, value in [
("forget_gate", forget_gate),
("input_gate", input_gate),
("output_gate", output_gate),
("c_t", c_t),
("h_t", h_t),
]:
print(f"{name:<12} {float(value):.4f}")
Expected output:
scalar_lstm_lab
forget_gate 0.7311
input_gate 0.5498
output_gate 0.6682
c_t 0.9787
h_t 0.5028
Read the update as:
new cell memory = keep part of old memory + write part of new candidate
That is the core of LSTM.
GRU: A Lighter Gated Model
GRU has fewer moving parts than LSTM. It does not keep a separate cell state. The hidden state carries the memory.
| Gate | Role |
|---|---|
| update gate | controls how much old state and new candidate are mixed |
| reset gate | controls how much old state is used when making the candidate |
Lab 2: Scalar GRU Gate Demo
import numpy as np
def sigmoid(x):
return 1 / (1 + np.exp(-x))
h_prev = 0.7
x_t = 1.1
update_gate = sigmoid(0.8)
reset_gate = sigmoid(-0.3)
h_candidate = np.tanh(x_t + reset_gate * h_prev)
h_t = (1 - update_gate) * h_prev + update_gate * h_candidate
print("scalar_gru_lab")
for name, value in [
("update_gate", update_gate),
("reset_gate", reset_gate),
("h_candidate", h_candidate),
("h_t", h_t),
]:
print(f"{name:<12} {float(value):.4f}")
Expected output:
scalar_gru_lab
update_gate 0.6900
reset_gate 0.4256
h_candidate 0.8849
h_t 0.8276
Quick memory aid:
LSTM = more explicit memory management
GRU = lighter gated memory management
Lab 3: PyTorch LSTM and GRU Shapes
import torch
from torch import nn
torch.manual_seed(42)
x = torch.randn(4, 6, 8)
lstm = nn.LSTM(input_size=8, hidden_size=16, batch_first=True)
gru = nn.GRU(input_size=8, hidden_size=16, batch_first=True)
lstm_out, (lstm_h, lstm_c) = lstm(x)
gru_out, gru_h = gru(x)
print("shape_lab")
print("lstm_out:", tuple(lstm_out.shape))
print("lstm_h :", tuple(lstm_h.shape))
print("lstm_c :", tuple(lstm_c.shape))
print("gru_out :", tuple(gru_out.shape))
print("gru_h :", tuple(gru_h.shape))
Expected output:
shape_lab
lstm_out: (4, 6, 16)
lstm_h : (1, 4, 16)
lstm_c : (1, 4, 16)
gru_out : (4, 6, 16)
gru_h : (1, 4, 16)
The visible API difference:
- LSTM returns
(h, c); - GRU returns only
h.
Lab 4: Train a Memory Task
The label depends on the first value in the sequence. The middle values are noisy, so the model must keep early information.
import torch
from torch import nn
torch.manual_seed(42)
def build_dataset(n=160, seq_len=10):
X, y = [], []
for _ in range(n):
first = 1.0 if torch.rand(1).item() > 0.5 else -1.0
seq = torch.randn(seq_len, 1) * 0.25
seq[0, 0] = first
X.append(seq)
y.append(1 if first > 0 else 0)
return torch.stack(X), torch.tensor(y)
X, y = build_dataset()
class GRUClassifier(nn.Module):
def __init__(self):
super().__init__()
self.gru = nn.GRU(input_size=1, hidden_size=8, batch_first=True)
self.fc = nn.Linear(8, 2)
def forward(self, x):
out, h = self.gru(x)
return self.fc(h[-1])
model = GRUClassifier()
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.03)
for epoch in range(1, 81):
logits = model(X)
loss = loss_fn(logits, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if epoch == 1 or epoch % 20 == 0:
acc = (logits.argmax(1) == y).float().mean().item()
print(f"memory epoch={epoch:02d} loss={loss.item():.4f} acc={acc:.3f}")
with torch.no_grad():
final_acc = (model(X).argmax(1) == y).float().mean().item()
print("final_acc", round(final_acc, 3))
Expected output:
memory epoch=01 loss=0.7465 acc=0.431
memory epoch=20 loss=0.6691 acc=0.569
memory epoch=40 loss=0.0023 acc=1.000
memory epoch=60 loss=0.0001 acc=1.000
memory epoch=80 loss=0.0001 acc=1.000
final_acc 1.0
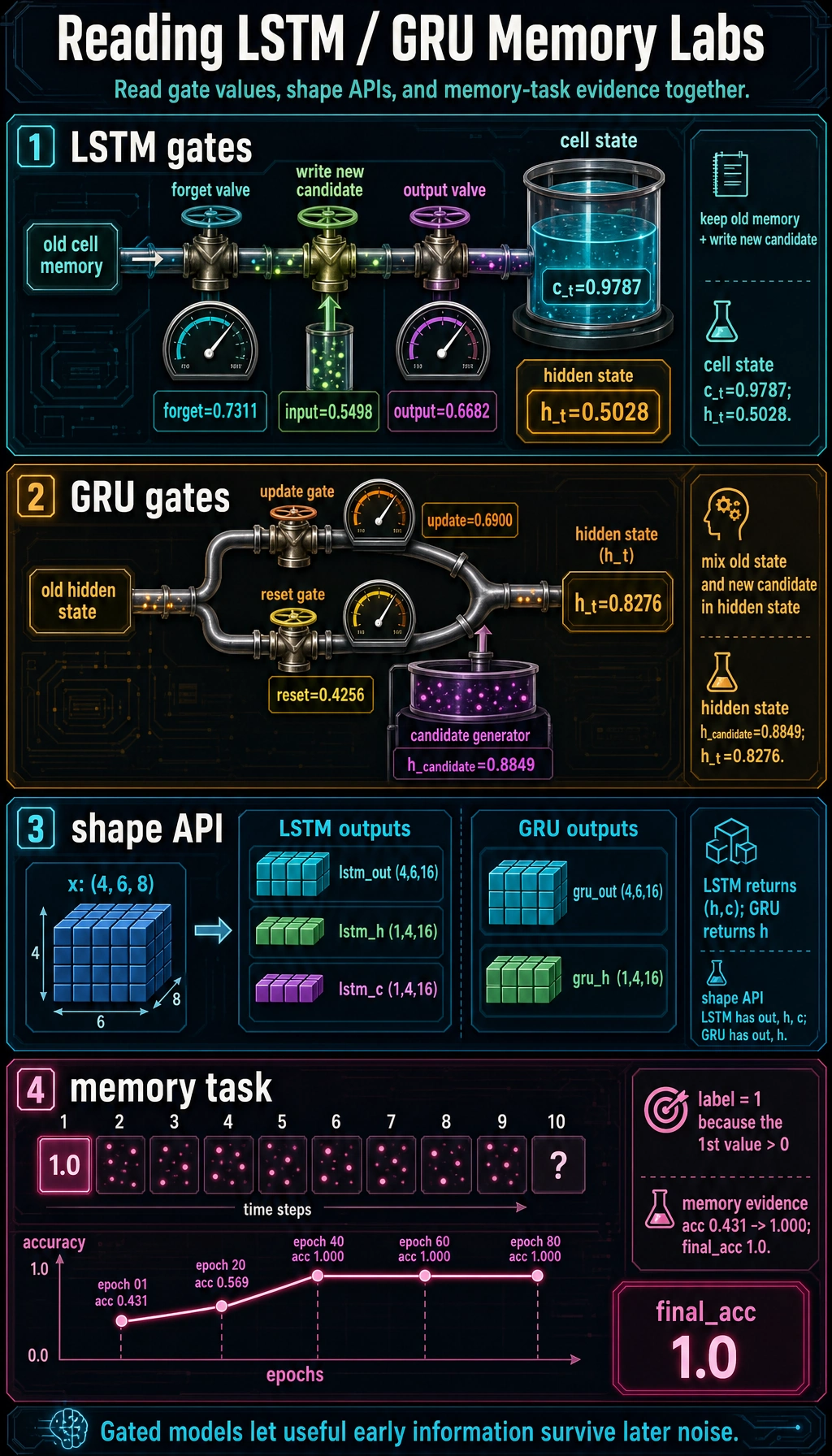
The gate values show how state is mixed, the shape check shows the PyTorch API contract, and the memory curve proves the model learned to keep the first-step signal through later noise.
This toy task is small, but it captures the reason gated recurrent models exist: the model needs to preserve useful early information through noisy later steps.
LSTM or GRU?
| Situation | Good starting point |
|---|---|
| quick baseline | GRU |
| small model budget | GRU |
| long dependency is central | LSTM and GRU both worth trying |
| you need explicit cell state intuition | LSTM |
| modern long text tasks | often Transformer instead |
In practice, compare validation results. Architecture names are less important than whether the model fits the data and deployment constraints.
Common Mistakes
| Mistake | Fix |
|---|---|
| thinking LSTM/GRU are just deeper RNNs | think “memory control,” not depth |
confusing out, h, and c | out per step, h final hidden, c LSTM cell state |
| assuming gates never forget important info | gates are learned and can still fail |
| using high learning rate on unstable sequences | lower LR, clip gradients if needed |
| using only training accuracy | validate on held-out sequences |
Exercises
- Change
forget_gatein Lab 1 by replacingsigmoid(1.0)withsigmoid(-1.0). How doesc_tchange? - Change the memory task so the label depends on the last value. Is it easier?
- Replace
GRUClassifierwith anLSTMClassifierand compare the output API. - Increase
seq_lenfrom10to30. Does training become harder? - Explain why GRU has fewer states than LSTM but can still work well.
Key Takeaways
- LSTM and GRU add gates to control memory flow.
- LSTM has both
c_tandh_t; GRU uses a lighter hidden-state design. - Gates are learned soft switches between
0and1. - Use validation results to choose between LSTM and GRU.
- Gated recurrent models are an important bridge from plain RNNs to attention-based sequence modeling.