6.4.4 Sequence Modeling in Practice
This lesson turns sequence modeling into a small project: convert a continuous series into sliding-window samples, train an LSTM, compare against a naive baseline, and inspect validation predictions.
Learning Goals
- Convert a continuous time series into supervised learning samples.
- Keep LSTM inputs in
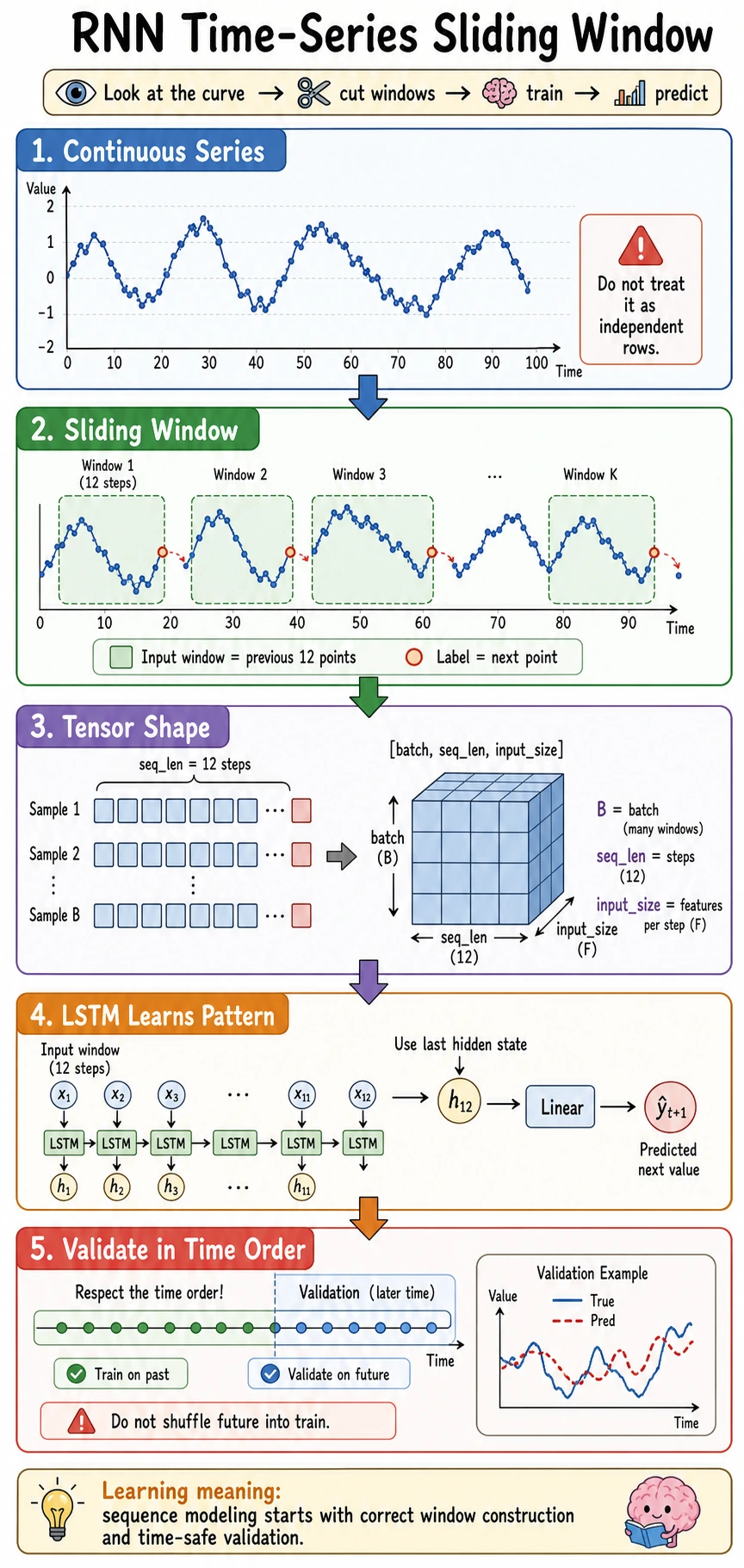
[batch, seq_len, input_size]. - Split validation data in time order to avoid future leakage.
- Train an LSTM forecaster and compare it with a naive baseline.
- Read validation loss and prediction samples.
The Core Workflow
continuous series -> sliding windows -> time-order split -> LSTM -> validation MSE -> prediction inspection
For time series, avoid random splitting by default. If future points leak into training, validation becomes too optimistic.
Sliding Window in One Minute
If window_size = 3:
series: [1, 2, 3, 4, 5, 6]
X[0] = [1, 2, 3] -> y[0] = 4
X[1] = [2, 3, 4] -> y[1] = 5
X[2] = [3, 4, 5] -> y[2] = 6
That is how a continuous sequence becomes training rows.
Full Lab: LSTM Forecasting
The synthetic series combines two waves and noise. This is still small, but it is closer to real data than a perfect sine wave.
import numpy as np
import torch
from torch import nn
np.random.seed(42)
torch.manual_seed(42)
def make_windows(series, window_size):
X, y = [], []
for i in range(len(series) - window_size):
X.append(series[i : i + window_size])
y.append(series[i + window_size])
X = torch.tensor(np.array(X), dtype=torch.float32).unsqueeze(-1)
y = torch.tensor(np.array(y), dtype=torch.float32).unsqueeze(-1)
return X, y
t = np.arange(0, 220)
series = (
np.sin(t * 0.12)
+ 0.25 * np.sin(t * 0.03)
+ np.random.randn(len(t)) * 0.04
).astype(np.float32)
window_size = 16
X, y = make_windows(series, window_size)
split = int(len(X) * 0.8)
X_train, X_val = X[:split], X[split:]
y_train, y_val = y[:split], y[split:]
print("window_lab")
print("X:", tuple(X.shape), "y:", tuple(y.shape))
print("train:", tuple(X_train.shape), "val:", tuple(X_val.shape))
naive_val = ((X_val[:, -1, :] - y_val) ** 2).mean().item()
print("naive_val_mse:", round(naive_val, 4))
class LSTMForecaster(nn.Module):
def __init__(self, hidden_size=32):
super().__init__()
self.lstm = nn.LSTM(1, hidden_size, batch_first=True)
self.fc = nn.Linear(hidden_size, 1)
def forward(self, x):
out, _ = self.lstm(x)
return self.fc(out[:, -1, :])
model = LSTMForecaster(32)
loss_fn = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
for epoch in range(1, 121):
model.train()
pred = model(X_train)
loss = loss_fn(pred, y_train)
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)
optimizer.step()
if epoch == 1 or epoch % 30 == 0:
model.eval()
with torch.no_grad():
val_loss = loss_fn(model(X_val), y_val)
print(f"epoch={epoch:03d} train_mse={loss.item():.4f} val_mse={val_loss.item():.4f}")
model.eval()
with torch.no_grad():
val_pred = model(X_val)
print("first_5_pred:", [round(v, 3) for v in val_pred[:5, 0].tolist()])
print("first_5_true:", [round(v, 3) for v in y_val[:5, 0].tolist()])
Expected output:
window_lab
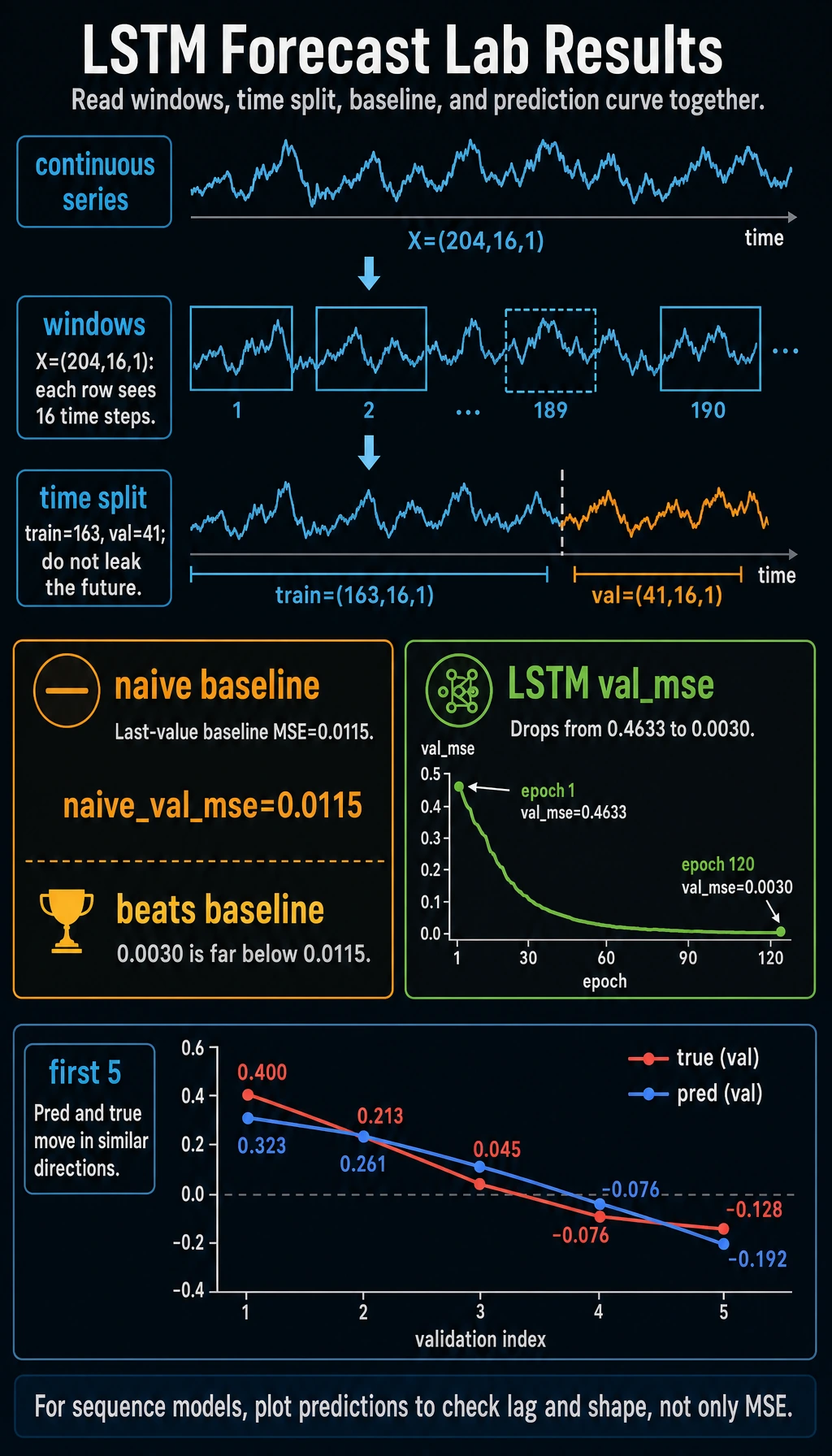
X: (204, 16, 1) y: (204, 1)
train: (163, 16, 1) val: (41, 16, 1)
naive_val_mse: 0.0115
epoch=001 train_mse=0.5168 val_mse=0.4633
epoch=030 train_mse=0.0049 val_mse=0.0046
epoch=060 train_mse=0.0032 val_mse=0.0035
epoch=090 train_mse=0.0029 val_mse=0.0032
epoch=120 train_mse=0.0028 val_mse=0.0030
first_5_pred: [0.323, 0.261, 0.145, -0.025, -0.192]
first_5_true: [0.4, 0.213, 0.045, -0.076, -0.128]
Read the Output
| Output | Meaning |
|---|---|
X: (204, 16, 1) | 204 windows, 16 time steps, 1 feature per step |
train: (163, 16, 1) | first 80% of windows used for training |
val: (41, 16, 1) | later windows used for validation |
naive_val_mse | baseline: predict the next value as the last observed value |
val_mse | LSTM validation error |
first_5_pred vs first_5_true | quick sanity check for direction and scale |
The LSTM beats the naive baseline in this run (0.0030 vs 0.0115). That matters: a model should beat a simple baseline before you trust it.
Why Use Gradient Clipping?
RNN-style models can sometimes produce large gradients. This line caps the total gradient norm:
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)
It is not always required, but it is a good practical safety habit in sequence models.
What to Plot in a Notebook
In a notebook, add:
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 4))
plt.plot(y_val.squeeze(-1).numpy(), label="true")
plt.plot(val_pred.squeeze(-1).numpy(), label="pred")
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()
Look for:
- lag: predictions follow the shape but arrive late;
- flatline: model predicts an average value;
- missed peaks: window is too short or model too weak;
- noisy prediction: learning rate, data noise, or overfitting issues.
Common Pitfalls
| Pitfall | Why it hurts | Fix |
|---|---|---|
| random train/val split | future leaks into training | split in time order |
| window too short | model cannot see enough context | try larger window_size |
| window too long | harder optimization, more noise | compare validation loss |
| no baseline | model may look good but be trivial | compare with naive last-value baseline |
| only checking MSE | trend may lag or flatten | plot prediction curves |
| no scaling on real data | large ranges destabilize training | normalize using train statistics |
From Toy Series to Real Projects
Real sequence projects may use:
- multiple features per step;
- missing-value handling;
- normalization based only on training data;
- rolling-origin validation;
- GRU, Temporal CNN, Transformer, or statistical baselines;
- business metrics, not only MSE.
But the workflow stays the same: define windows, protect time order, compare baselines, and inspect predictions.
Exercises
- Change
window_sizeto8and32. Which validation MSE is better? - Replace
nn.LSTMwithnn.GRU. Does it train faster or differently? - Remove gradient clipping. Does training remain stable?
- Add a second feature, such as
np.cos(t * 0.12). - Implement a rolling forecast that feeds predictions back into the next window.
Key Takeaways
- Sliding windows turn a continuous sequence into supervised learning samples.
- Time-based validation prevents future leakage.
- A naive baseline is required for meaningful evaluation.
- LSTM inputs use
[batch, seq_len, input_size]. - Plots and prediction samples often reveal issues that a single loss value hides.