4.2.4 統計推論の基礎
- 最尤推定(MLE)の直感を理解する——なぜ「確率を最大化する」のか
- 最大事後推定(MAP)を理解する——事前知識を加える
- 仮説検定と p 値を理解する(A/Bテストの考え方)
- Python で MLE を実装する
推論の前に用語を読み解く
Section titled “推論の前に用語を読み解く”統計推論には短い略語が多く出てきます。孤立した定義として暗記するより、1 つの流れとして読むと理解しやすくなります。
| 用語 | 正式名称 / 意味 | 初学者向けの問い |
|---|---|---|
MLE | Maximum Likelihood Estimation、最尤推定 | 観測データを最も起こりやすくするパラメータはどれか? |
MAP | Maximum A Posteriori、最大事後推定 | データと事前知識を合わせたとき、最も妥当なパラメータはどれか? |
EM | Expectation-Maximization、期待値最大化 | 隠れた変数があるとき、どう仮定と更新を交互に行うか? |
likelihood | 尤度 | そのパラメータが本当なら、このデータはどれくらい自然か? |
log-likelihood | 対数尤度 | 小さな確率の積を、数値的に安定した足し算として扱う方法 |
prior | 事前分布 / 事前確率 | 現在のデータを見る前に、何を信じていたか? |
posterior | 事後分布 / 事後確率 | データと事前知識を合わせた後、判断はどう更新されたか? |
p-value | 帰無仮説のもとでの尾部確率 | 本当に差がないなら、この結果はどれくらい珍しいか? |
CI | Confidence interval、信頼区間 | 未知の値が入りそうな範囲はどこか? |
大事な注意:p 値は 「帰無仮説が正しい確率」ではありません。帰無仮説が正しいと仮定したときに、現在と同じくらい極端な結果が出る確率です。
歴史的背景:MLE と EM はそれぞれどう生まれたのか?
Section titled “歴史的背景:MLE と EM はそれぞれどう生まれたのか?”この節には、特に知っておくとよい歴史的な節目が 2 つあります。
| 年 | 節目 | 主要な著者 | 最も重要に解決したこと |
|---|---|---|---|
| 1922 | Maximum Likelihood Estimation | Ronald Fisher | 「観測データを最もよく説明するパラメータ」を体系化し、統計学習や損失関数の主流の重要な土台になった |
| 1977 | EM Algorithm | Dempster, Laird, Rubin | 「潜在変数や欠損情報がある」パラメータ推定問題に、安定した反復フレームワークを与えた |
ここでとても大事な区別があります。
- MLE は、より広い分野 / 原則
- EM は、ある種の難しい場面で MLE を求めるための代表的な方法
なので、初めてこの節を学ぶ人がまず知るべきなのは次のことです。
MLE は「どのパラメータが本物らしいか」を答え、EM は「問題の中に見えない部分があるとき、どうやって少しずつそのパラメータに近づくか」を答えます。
なぜこの流れは、初学者にとって特に魅力的なのか?
Section titled “なぜこの流れは、初学者にとって特に魅力的なのか?”それは、「データから規則を逆に推測する」ことが、まるで事件を解くように感じられるからです。
- 真実を直接見ているわけではない
- パラメータも誰も教えてくれない
- でも、手元にはたくさんの観測の痕跡がある
すると、問題はこう変わります。
- どんな説明が、この痕跡を一番うまくつなげられるのか?
MLE は「探偵っぽい」と感じさせ、 EM は「見えない箱の中を手探りで進む」ように感じさせます。 だから、統計推論を初めて真剣に学ぶ人は、突然こう思うことがあります。
なるほど、モデルの学習は単に式を計算するだけではなく、段階的に逆算していく作業なんだ。
なぜこの流れが、その後の統計学習でとても重要になったのか?
Section titled “なぜこの流れが、その後の統計学習でとても重要になったのか?”とても素朴な問いを、すごく分かりやすく説明しているからです。
- 世界はパラメータをそのまま教えてくれない
- だから、データから逆向きに推測するべき
MLE の一番魅力的なところは、まさに探偵の仕事に似ていることです。
- 現場にはたくさんの痕跡が残っている
- 真実は分からない
- でも「どの説明が本当に起きたことに一番近いか?」は考えられる
そして EM は、こう言っているようなものです。
- 現場の情報の一部が、どうしても見えないなら
- それでも諦めず、まず 1 回仮定して、そこから何度も修正して近づいていこう
だから、この主線が初学者にとって魅力的なのは、
「データから規則を逆に推測する」ことが、段階的で、戦略があり、少しずつ近づけるプロセスとして見えるようになるからです。
まず、とても大事な学習イメージ
Section titled “まず、とても大事な学習イメージ”この節は、MLE / MAP / p 値 が出てきたところで、急に難しく感じやすいです。
でも、ここで大事なのは、統計推論を統計学の授業のように全部完璧に覚えることではなく、まず次のことを知ることです。
- データが見えたとき、私たちは何を逆に推測したいのか
- 「データを最もよく説明する」とは、数学的にどういう意味か
- なぜこれらの考え方が、最終的に loss、正則化、A/Bテストにそのままつながるのか
まずは全体の地図を作る
Section titled “まずは全体の地図を作る”前の 2 つの節では「確率をどう定義するか、分布はどんな形か」を学びました。 ここからは次の段階に進みます。
データを手に入れたとき、その背後にあるパラメータや結論をどう逆推測するのか?
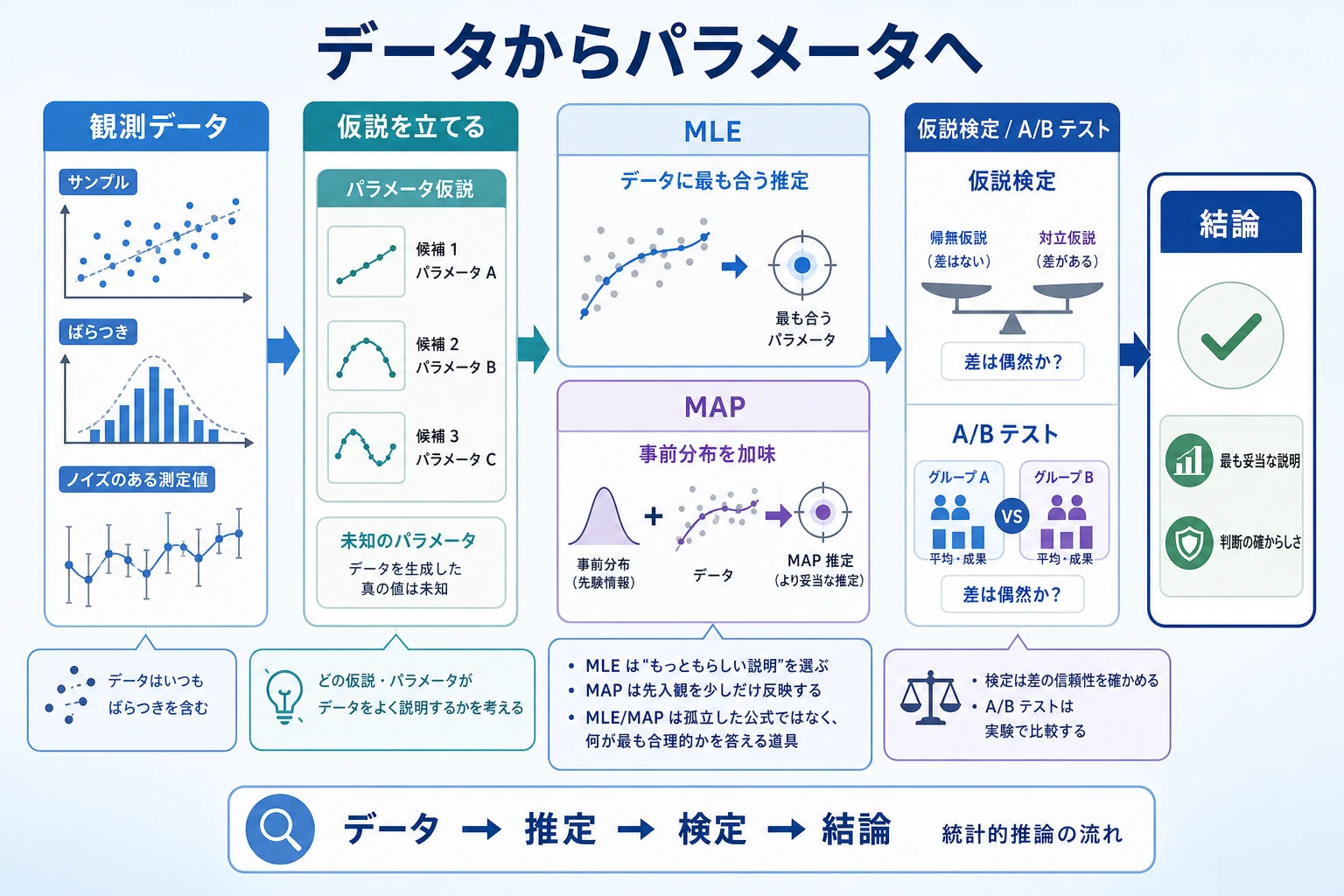
この節で一番大事なのは、用語を覚えることより、まず次の 3 つをつかむことです。
- MLE:どのパラメータがこのデータを一番よく説明するか
- MAP:データに加えて、事前の常識も考える
- 仮説検定:差が見えたとき、それが偶然かどうかを判断する
一、最尤推定(MLE)
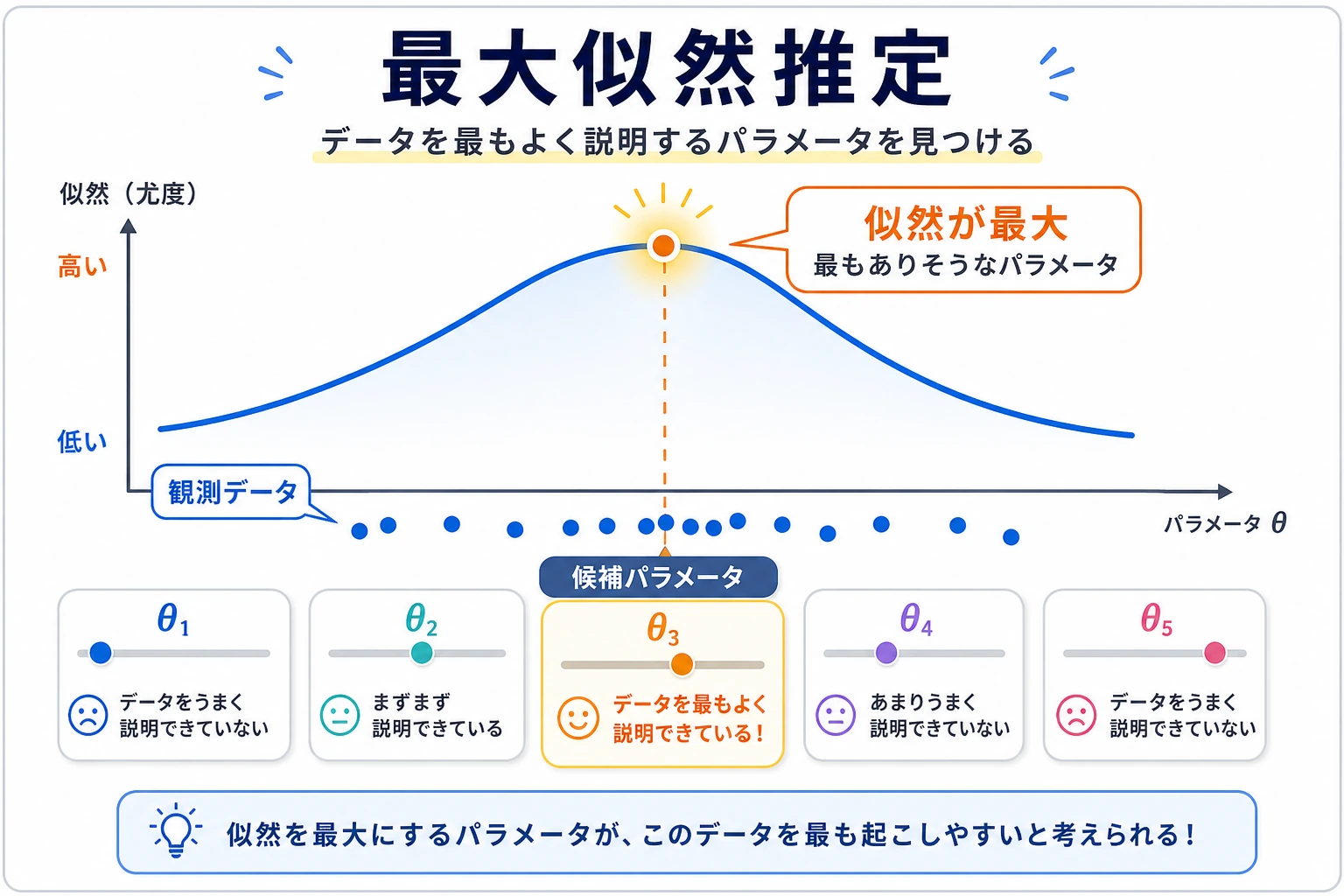
Section titled “一、最尤推定(MLE)”直感:どのパラメータがデータを一番よく説明するか?
Section titled “直感:どのパラメータがデータを一番よく説明するか?”コインを 1 枚拾いました。公平かどうか分かりません。10 回投げたら、表表裏表表表裏表表表 でした(表 8 回、裏 2 回)。
質問:このコインが表になる確率 p は、どれくらいが最もありそうでしょうか?
直感的には、p ≈ 0.8 です。MLE はこの直感を数式にしたものです——観測されたデータが起こる確率を最大にするパラメータを見つけるのです。
初学者向けの、もっと覚えやすい例え
Section titled “初学者向けの、もっと覚えやすい例え”MLE はまず、「探偵が事件を再現する」作業だと思うと分かりやすいです。
- すでにいくつかの手がかり(観測データ)を見ている
- そこから、どんなパラメータ設定ならこの出来事が本当に起きたように見えるかを逆算する
つまり、MLE の中心は「最大化したいから最大化する」のではなく、こういうことです。
目の前のデータを最もよく説明できるパラメータを見つける。
flowchart LR D["観測データ<br/>表 8 回 / 裏 2 回"] --> Q["どの p が<br/>このデータを一番よく説明する?"] Q --> MLE["p = 0.8<br/>(最尤推定)"]
style D fill:#e3f2fd,stroke:#1565c0,color:#333 style MLE fill:#e8f5e9,stroke:#2e7d32,color:#333コードで理解する
Section titled “コードで理解する”import numpy as npimport matplotlib.pyplot as pltfrom scipy import stats
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS']plt.rcParams['axes.unicode_minus'] = False
# 観測データ:10 回投げて、表 8 回・裏 2 回n_heads = 8n_tails = 2n_total = n_heads + n_tails
# さまざまな p について、このデータが起こる確率(尤度関数)を計算するp_values = np.linspace(0.01, 0.99, 1000)
# 尤度関数:L(p) = C(n,k) * p^k * (1-p)^(n-k)# p に依存しない C(n,k) は無視してよいlikelihood = p_values**n_heads * (1 - p_values)**n_tails
# MLE:尤度が最大の pp_mle = p_values[np.argmax(likelihood)]print(f"MLE 推定: p = {p_mle:.3f}")
# 可視化plt.figure(figsize=(10, 5))plt.plot(p_values, likelihood, color='steelblue', linewidth=2)plt.axvline(x=p_mle, color='red', linestyle='--', linewidth=2, label=f'MLE: p = {p_mle:.2f}')plt.fill_between(p_values, likelihood, alpha=0.1, color='steelblue')plt.xlabel('p(表が出る確率)')plt.ylabel('尤度 L(p)')plt.title(f'尤度関数:硬貨を 10 回投げる、表 {n_heads} 回・裏 {n_tails} 回')plt.legend(fontsize=12)plt.grid(True, alpha=0.3)plt.show()期待される出力:
MLE 推定: p = 0.800MLE の数学的な直感
Section titled “MLE の数学的な直感”MLE の答えは実はとてもシンプルです。p = 表の回数 / 総回数 = 8/10 = 0.8
ただし、MLE の価値は、これがどんな分布にも使える共通の考え方だという点にあります。 つまり、どんな分布でも、同じ発想でパラメータを探せます。
これが AI にとって特に重要な理由
Section titled “これが AI にとって特に重要な理由”多くの損失関数は、一見すると「最適化している」だけに見えます。 でも、もっと深い見方をすると、実際には次のことをしています。
- パラメータの組を探す
- その組が、学習データを一番よく説明するようにする
つまり、MLE は多くの学習目標の共通言語です。
データが増えるほど、推定はより正確になる
Section titled “データが増えるほど、推定はより正確になる”# 本当の p = 0.6rng = np.random.default_rng(seed=42)true_p = 0.6n_experiments = [10, 50, 100, 500, 2000]
fig, axes = plt.subplots(1, len(n_experiments), figsize=(20, 4))
for ax, n in zip(axes, n_experiments): # n 回コインを投げる heads = rng.binomial(n, true_p)
# 尤度関数 p_vals = np.linspace(0.01, 0.99, 500) ll = heads * np.log(p_vals) + (n - heads) * np.log(1 - p_vals) ll = np.exp(ll - ll.max()) # 正規化
p_mle = heads / n print(f"n={n:4d}, 表={heads:4d}, MLE={p_mle:.3f}")
ax.plot(p_vals, ll, color='steelblue', linewidth=2) ax.axvline(x=true_p, color='green', linestyle='--', label=f'真の p={true_p}') ax.axvline(x=p_mle, color='red', linestyle='--', label=f'MLE={p_mle:.3f}') ax.set_title(f'n = {n}') ax.set_xlabel('p') ax.legend(fontsize=8)
plt.suptitle('データが多いほど、MLE はより正確で、より確実になる(曲線が細くなる)', fontsize=13)plt.tight_layout()plt.show()seed=42 の場合の期待される出力:
n= 10, 表= 5, MLE=0.500n= 50, 表= 31, MLE=0.620n= 100, 表= 69, MLE=0.690n= 500, 表= 318, MLE=0.636n=2000, 表=1212, MLE=0.606解釈:データが多いほど、尤度関数のピークは細くなり、真の値に近づきます。これが「ビッグデータ」の力です。
二、最大事後推定(MAP)
Section titled “二、最大事後推定(MAP)”MLE の問題点
Section titled “MLE の問題点”もしコインを 3 回だけ投げて、すべて表だったら、MLE は p = 3/3 = 1.0 と答えます。 つまり、「このコインは永遠に表が出る」と言っていることになります。
これは明らかに不自然です。私たちの常識では、普通のコインの p は 0.5 に近いはずです。
MAP:事前知識を加える
Section titled “MAP:事前知識を加える”MAP は MLE に「事前知識(prior)」を加えます。つまり、パラメータについての前もっての信念です。
MAP = 尤度 × 事前分布
もっと覚えやすい言い方
Section titled “もっと覚えやすい言い方”MLE が
- 目の前の証拠だけを見る
だとしたら、MAP はもっとこうです。
- 目の前の証拠 + もともと持っている世界の常識
だから、AI の中のいろいろな現象を説明するのにとても向いています。
- なぜ「パラメータを大きくしすぎない」ようにすると安定するのか
- なぜ正則化は単なるテクニックではなく、ある種の事前仮定なのか
# データ:3 回すべて表n, k = 3, 3
p_values = np.linspace(0.01, 0.99, 1000)
# 尤度関数likelihood = p_values**k * (1 - p_values)**(n - k)
# 事前分布:p は 0.5 付近にあると考える(Beta 分布で表現)prior = stats.beta.pdf(p_values, a=5, b=5) # 0.5 を中心とした事前分布
# 事後分布 ∝ 尤度 × 事前分布posterior = likelihood * priorposterior = posterior / np.trapezoid(posterior, p_values) # 正規化
# 最大値を探すp_mle = p_values[np.argmax(likelihood)]p_map = p_values[np.argmax(posterior)]
print(f"MLE: p = {p_mle:.3f}")print(f"MAP: p = {p_map:.3f}")
# 可視化fig, ax = plt.subplots(figsize=(10, 5))ax.plot(p_values, likelihood / np.trapezoid(likelihood, p_values), '--', color='coral', linewidth=2, label='尤度関数')ax.plot(p_values, prior / np.trapezoid(prior, p_values), '--', color='green', linewidth=2, label='事前分布')ax.plot(p_values, posterior, color='steelblue', linewidth=2, label='事後分布')ax.axvline(x=p_mle, color='coral', linestyle=':', alpha=0.7, label=f'MLE = {p_mle:.2f}')ax.axvline(x=p_map, color='steelblue', linestyle=':', alpha=0.7, label=f'MAP = {p_map:.2f}')ax.set_xlabel('p')ax.set_ylabel('確率密度')ax.set_title('MLE vs MAP(データが 3 回しかない場合)')ax.legend()ax.grid(True, alpha=0.3)plt.show()期待される出力:
MLE: p = 0.990MAP: p = 0.637解釈:
- MLE は p=1.0 に近い値を出す(少ないデータに引っ張られすぎる)
- MAP は p≈0.64 を出す(データと事前分布の折衷)
- データが増えると、MAP と MLE は同じ値に近づく
MLE vs MAP
Section titled “MLE vs MAP”| MLE | MAP | |
|---|---|---|
| 事前分布を使う? | いいえ | はい |
| データが少ないとき | 過学習しやすい | より安定 |
| データが多いとき | MAP に近づく | MLE に近づく |
| AI での対応 | 通常の学習 | 正則化(例:L2 正則化 = ガウス事前分布) |
三、仮説検定と A/Bテスト
Section titled “三、仮説検定と A/Bテスト”Web サイトのボタンの色を変えました(A 版は青、B 版は緑)。すると、B 版のクリック率が 2% 上がりました。
質問:この差は本当にあるのでしょうか? それとも単なるランダムな揺れでしょうか?
仮説検定の考え方
Section titled “仮説検定の考え方”flowchart TD A["仮説を立てる"] --> B["H₀:A と B に差はない<br/>(帰無仮説)"] A --> C["H₁:B は A より良い<br/>(対立仮説)"] B --> D["H₀ が正しいと仮定して<br/>観測された差がどれくらい<br/>「珍しい」かを計算する"] D --> E{"p 値 < 0.05?"} E -->|"はい"| F["H₀ を棄却する<br/>差は有意"] E -->|"いいえ"| G["H₀ を棄却しない<br/>差は偶然かもしれない"]
style F fill:#e8f5e9,stroke:#2e7d32,color:#333 style G fill:#ffebee,stroke:#c62828,color:#333p 値の直感
Section titled “p 値の直感”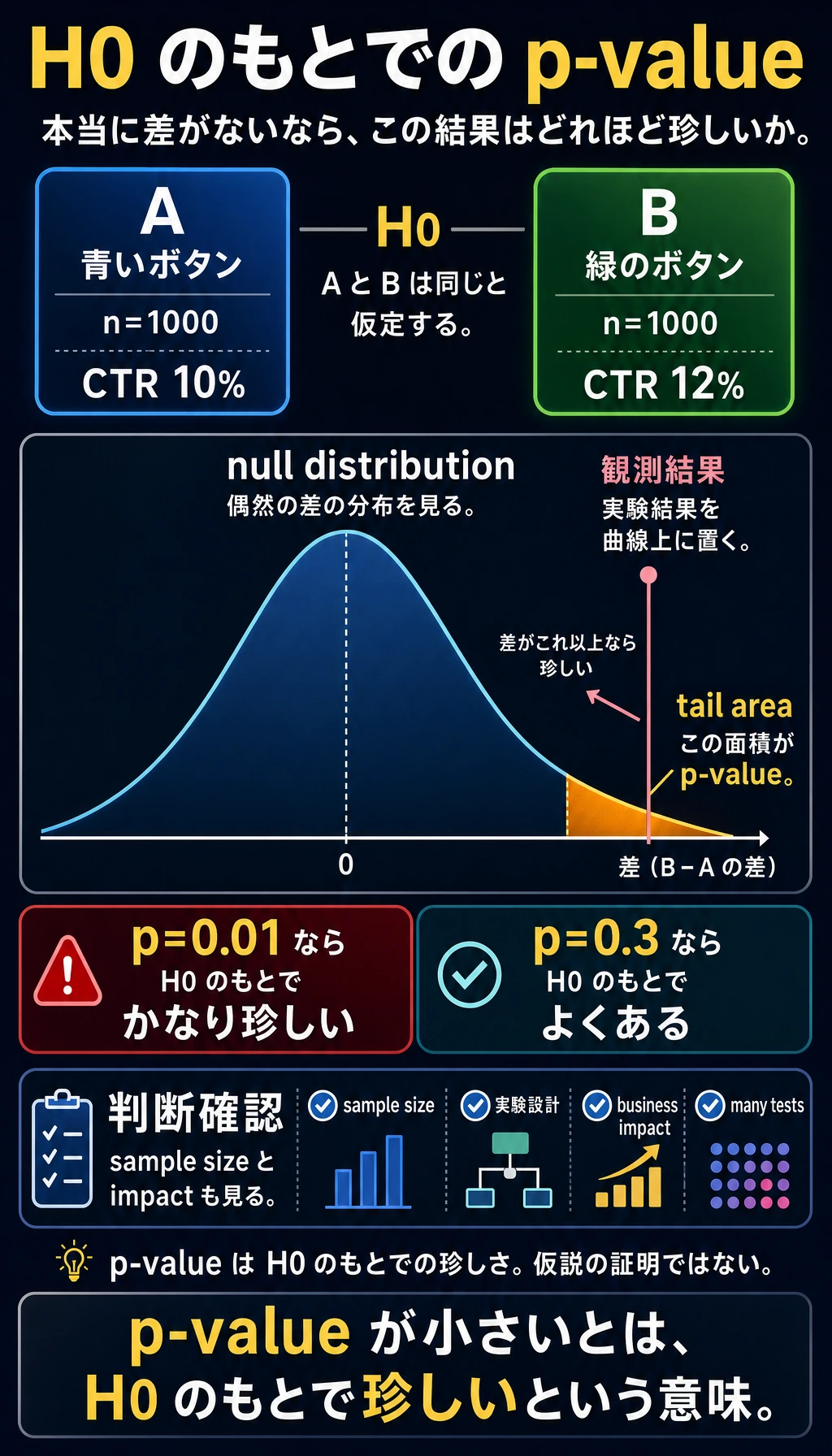
p 値 = 真の差がないと仮定したときに、これと同じくらい大きい(またはそれ以上の)差が、偶然だけで出る確率。
- p 値が小さい(たとえば 0.01)→ 「本当に差がないなら、こんな結果はほとんど起きない」→ 差は本物っぽい
- p 値が大きい(たとえば 0.3)→ 「本当に差がなくても、こういう結果はよく起きる」→ ただの偶然かもしれない
言い方には注意が必要です。p 値は、対立仮説が正しいことを証明するものではありません。帰無仮説が正しいとしたときに、観測結果がどれくらい珍しいかを示すだけです。実際のプロダクトでは、サンプルサイズ、実験設計、ビジネス上の影響、同時に多数の検定をしていないかも確認する必要があります。
A/Bテストの実践
Section titled “A/Bテストの実践”# A/Bテストをシミュレーションするrng = np.random.default_rng(seed=2)
# A グループ:青いボタン、真のクリック率 10%n_a = 1000clicks_a = rng.binomial(n_a, 0.10)rate_a = clicks_a / n_a
# B グループ:緑のボタン、真のクリック率 12%(本当に良い)n_b = 1000clicks_b = rng.binomial(n_b, 0.12)rate_b = clicks_b / n_b
print(f"A グループのクリック率: {rate_a:.1%} ({clicks_a}/{n_a})")print(f"B グループのクリック率: {rate_b:.1%} ({clicks_b}/{n_b})")print(f"差: {rate_b - rate_a:.1%}")
# z 検定を使うfrom scipy.stats import norm
# 合算比率p_pool = (clicks_a + clicks_b) / (n_a + n_b)# 標準誤差se = np.sqrt(p_pool * (1 - p_pool) * (1/n_a + 1/n_b))# z 統計量z = (rate_b - rate_a) / se# p 値(片側)p_value = 1 - norm.cdf(z)
print(f"\nz 統計量: {z:.3f}")print(f"p 値: {p_value:.4f}")
if p_value < 0.05: print("→ p < 0.05 なので、差は有意です!B 版は本当に良いです。")else: print("→ p >= 0.05 なので、差は有意ではありません。偶然かもしれません。")seed=2 の場合の期待される出力:
A グループのクリック率: 10.3% (103/1000)B グループのクリック率: 12.9% (129/1000)差: 2.6%
z 統計量: 1.816p 値: 0.0347→ p < 0.05 なので、差は有意です!B 版は本当に良いです。シミュレーションで p 値を理解する
Section titled “シミュレーションで p 値を理解する”# シミュレーション:A と B に本当に差がない(どちらも 10%)なら、# どれくらいの差が見えるのか?rng = np.random.default_rng(seed=2)n_simulations = 10000simulated_diffs = []
for _ in range(n_simulations): # 2 つのグループに同じ 10% の確率を使う sim_a = rng.binomial(1000, 0.10) / 1000 sim_b = rng.binomial(1000, 0.10) / 1000 simulated_diffs.append(sim_b - sim_a)
simulated_diffs = np.array(simulated_diffs)
# 分布を描くobserved_diff = rate_b - rate_a
plt.figure(figsize=(10, 5))plt.hist(simulated_diffs, bins=50, density=True, color='steelblue', edgecolor='white', alpha=0.7, label='帰無仮説下の差の分布')plt.axvline(x=observed_diff, color='red', linewidth=2, linestyle='--', label=f'観測された差: {observed_diff:.3f}')
# p 値 = 赤線より右側の面積p_sim = (simulated_diffs >= observed_diff).mean()plt.fill_between(np.linspace(observed_diff, 0.08, 100), 0, 30, alpha=0.3, color='red', label=f'p 値 ≈ {p_sim:.4f}')
plt.xlabel('クリック率の差 (B - A)')plt.ylabel('密度')plt.title('p 値の直感:観測された差はどれくらい「珍しい」か?')plt.legend()plt.grid(True, alpha=0.3)plt.show()数値でも確認したい場合は、次を追加してください。
print(f"シミュレーション p 値: {p_sim:.4f}")seed=2 の場合の期待される出力:
シミュレーション p 値: 0.0262四、MLE と損失関数の関係
Section titled “四、MLE と損失関数の関係”MLE = 交差エントロピーを最小化すること
Section titled “MLE = 交差エントロピーを最小化すること”これはとても重要な関係です——分類問題では、尤度を最大化することは、交差エントロピー損失を最小化することと等価です。
# 二値分類問題# モデル予測: p_hat = モデルがラベル 1 だと考える確率# 正解ラベル: y ∈ {0, 1}
# 尤度関数# L = ∏ p_hat^y * (1-p_hat)^(1-y)
# 対数を取る(対数尤度)# log L = Σ [y * log(p_hat) + (1-y) * log(1-p_hat)]
# log L を最大化する = -log L を最小化する = 交差エントロピーを最小化する!
# 例y_true = np.array([1, 0, 1, 1, 0])p_pred = np.array([0.9, 0.2, 0.8, 0.7, 0.3])
# 交差エントロピー(手計算)cross_entropy = -np.mean( y_true * np.log(p_pred) + (1 - y_true) * np.log(1 - p_pred))print(f"交差エントロピー損失: {cross_entropy:.4f}")
# 対数尤度(手計算)log_likelihood = np.mean( y_true * np.log(p_pred) + (1 - y_true) * np.log(1 - p_pred))print(f"対数尤度: {log_likelihood:.4f}")print(f"交差エントロピー = -対数尤度: {-log_likelihood:.4f}")期待される出力:
交差エントロピー損失: 0.2530対数尤度: -0.2530交差エントロピー = -対数尤度: 0.2530ここまで学んだら、次の節で何を持っていくべきか?
Section titled “ここまで学んだら、次の節で何を持っていくべきか?”この節を読んだあと、次に持っていくとよい問いは次の 3 つです。
- モデルが分布を予測するなら、「分布と分布の違い」はどう測るのか?
- なぜ交差エントロピーは、情報理論の概念にも、学習の損失にも見えるのか?
- なぜ KL 散逸は、VAE、RLHF、蒸留で何度も登場するのか?
この 3 つの問いは、自然に次へつながります。
flowchart LR MLE["MLE<br/>最尤推定"] --> CE["交差エントロピー損失<br/>分類タスク"] MAP["MAP<br/>最大事後推定"] --> REG["正則化<br/>過学習を防ぐ"]
style MLE fill:#e3f2fd,stroke:#1565c0,color:#333 style MAP fill:#e3f2fd,stroke:#1565c0,color:#333 style CE fill:#e8f5e9,stroke:#2e7d32,color:#333 style REG fill:#e8f5e9,stroke:#2e7d32,color:#333このページを終えたら、この evidence card を残します。
- 確率過程
- 事象、分布、サンプル、尤度、エントロピー、またはベイズ更新
- シミュレーションまたは式
- 不確実性を可視化するために使ったコードまたは式
- 出力
- probability、sample statistic、interval、entropy、または更新された信念
- 失敗確認
- ベースレートの混同、p値の誤用、サンプルバイアス、または確率と確実性の混同
- 期待される成果
- 数値結果と平易な言葉での解釈
| 概念 | 直感 | 公式/コード |
|---|---|---|
| MLE | データを一番よく説明するパラメータを見つける | 尤度関数を最大化する |
| MAP | MLE + 事前知識 | 尤度 × 事前分布を最大化する |
| p 値 | 差がどれくらい「珍しい」か | 帰無仮説下でその差が起こる確率 |
| A/Bテスト | 2 つのグループに本当の差があるか比べる | scipy.stats |
| 交差エントロピー | 交差エントロピーを最小化する = MLE | nn.CrossEntropyLoss() |
ハンズオン演習
Section titled “ハンズオン演習”演習 1:コイン投げの MLE
Section titled “演習 1:コイン投げの MLE”コインを 100 回投げて、表が 62 回出たとします。
- MLE で p を推定する
- 尤度関数を描く
- 事前分布が Beta(10, 10) のとき、MAP 推定はいくつか?
参考実装:
n = 100k = 62p_vals = np.linspace(0.01, 0.99, 1000)
likelihood = p_vals**k * (1 - p_vals)**(n - k)p_mle = p_vals[np.argmax(likelihood)]
prior = stats.beta.pdf(p_vals, 10, 10)posterior = likelihood * priorposterior = posterior / np.trapezoid(posterior, p_vals)p_map = p_vals[np.argmax(posterior)]
print(f"MLE 推定: {p_mle:.3f}")print(f"Beta(10, 10) 事前分布での MAP 推定: {p_map:.3f}")期待される出力:
MLE 推定: 0.620Beta(10, 10) 事前分布での MAP 推定: 0.602演習 2:A/Bテスト
Section titled “演習 2:A/Bテスト”A/Bテストをシミュレーションしてください:A グループ(n=500)の真のコンバージョン率は 8%、B グループ(n=500)の真のコンバージョン率も 8%(差はない)。これを 1000 回実行し、p 値が 0.05 未満になる回数を数えてください(これが「偽陽性率」です。理論上は約 5% のはずです)。
参考実装:
rng = np.random.default_rng(seed=42)false_positives = 0n_runs = 1000
for _ in range(n_runs): clicks_a = rng.binomial(500, 0.08) clicks_b = rng.binomial(500, 0.08) rate_a = clicks_a / 500 rate_b = clicks_b / 500
p_pool = (clicks_a + clicks_b) / 1000 se = np.sqrt(p_pool * (1 - p_pool) * (1/500 + 1/500)) if se == 0: continue
z = (rate_b - rate_a) / se p_value = 2 * (1 - norm.cdf(abs(z))) # 両側検定 false_positives += p_value < 0.05
print(f"偽陽性率: {false_positives / n_runs:.1%} ({false_positives}/{n_runs})")seed=42 の場合の期待される出力:
偽陽性率: 3.9% (39/1000)演習 3:正規分布の MLE 推定
Section titled “演習 3:正規分布の MLE 推定”N(5, 2) から 200 個のサンプルを生成し、MLE で平均と標準偏差を推定してください(正規分布の MLE:平均 = 標本平均、標準偏差 = 標本標準偏差)。真の値と比較してみましょう。
参考実装:
rng = np.random.default_rng(seed=42)samples = rng.normal(5, 2, 200)
mu_hat = samples.mean()sigma_hat = np.sqrt(((samples - mu_hat) ** 2).mean())
print(f"推定平均: {mu_hat:.3f}(真の平均: 5)")print(f"推定標準偏差: {sigma_hat:.3f}(真の標準偏差: 2)")期待される出力:
推定平均: 4.939(真の平均: 5)推定標準偏差: 1.759(真の標準偏差: 2)操作例と確認ポイント
- 100 回投げて 62 回表なら、MLE は
0.62です。対称なBeta(10,10)事前分布を入れると MAP は0.5に近づき、本文の grid コードでは約0.602になります。 - A/B の偽陽性シミュレーションでは、両群の真の転換率が 8% なので、
p < 0.05の割合はおよそ 5% になります。ただしランダムな揺れがあります。1 回の結果が高く見えても、真の効果の証明ではありません。 - 説明では effect size と統計的有意性を分けます。p-value は「帰無仮説の下でどれだけ意外か」を答えるもので、「ビジネス上どれだけ重要か」ではありません。