10.5.1 高度な視覚タスクのロードマップ:OCR、顔、動画、3D
高度な視覚タスクは、モデル名のリストではありません。同じ視覚基盤の上にある応用方向で、入力、出力、制約、リスクがより複雑になります。
まず direction map を見る
Section titled “まず direction map を見る”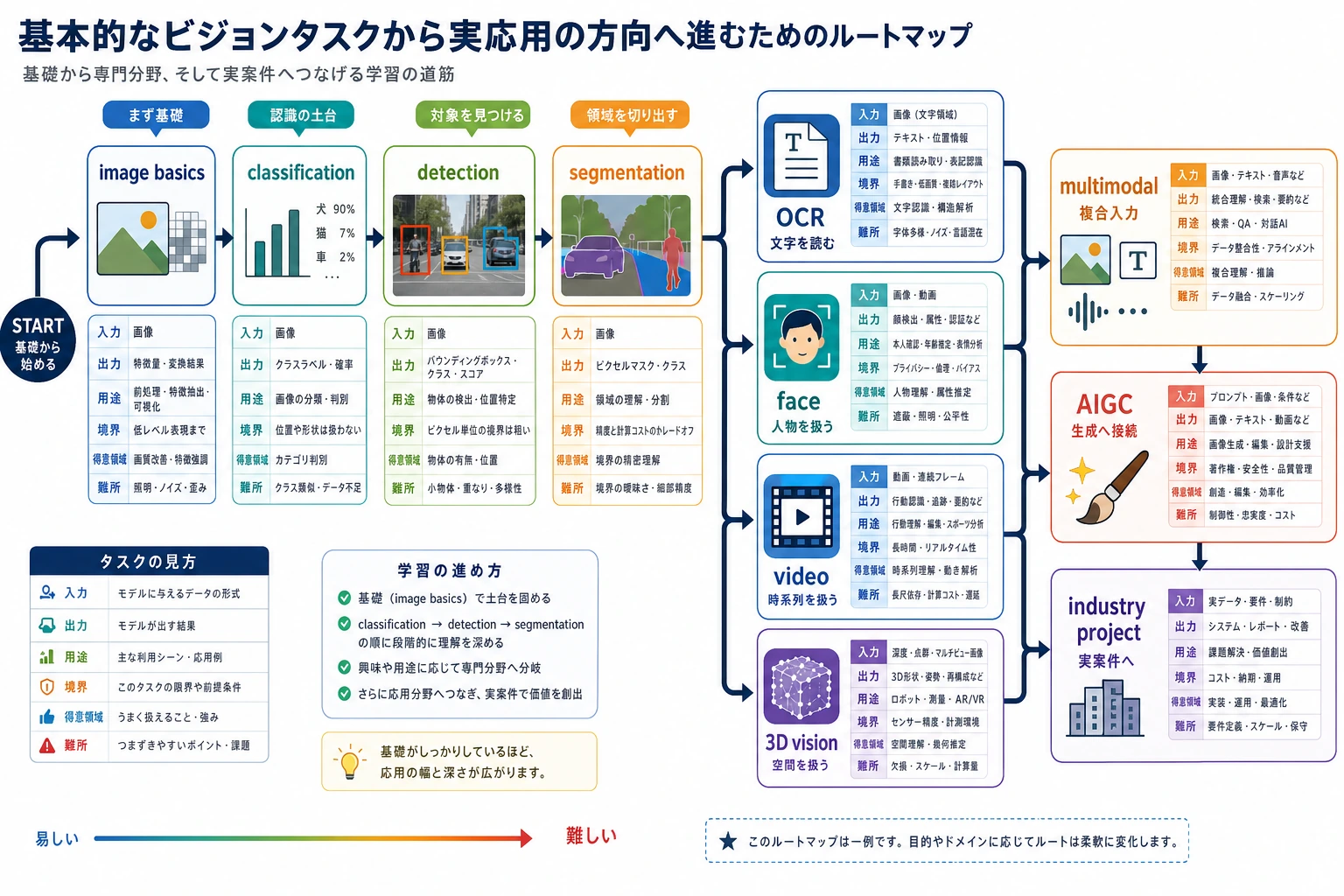
![]()
OCR は文書、顔認識は本人確認などの慎重な場面、動画は時間と動き、3D 視覚は空間構造に向いています。
Direction choice check を動かす
Section titled “Direction choice check を動かす”4 方向を浅く試すより、1 つを選びます。
requirement = { "input": "screenshot", "needs_text": True, "needs_identity": False, "needs_time": False, "needs_depth": False,}
if requirement["needs_text"]: direction = "OCR"elif requirement["needs_identity"]: direction = "Face"elif requirement["needs_time"]: direction = "Video"elif requirement["needs_depth"]: direction = "3D"else: direction = "Classification or detection"
print("direction:", direction)print("first_output:", "text with layout")出力:
direction: OCRfirst_output: text with layoutface、surveillance、medical、identity projects では、results を見せる前に privacy と usage boundaries を書きます。
この順番で学ぶ
Section titled “この順番で学ぶ”| 手順 | 方向 | 実践アウトプット |
|---|---|---|
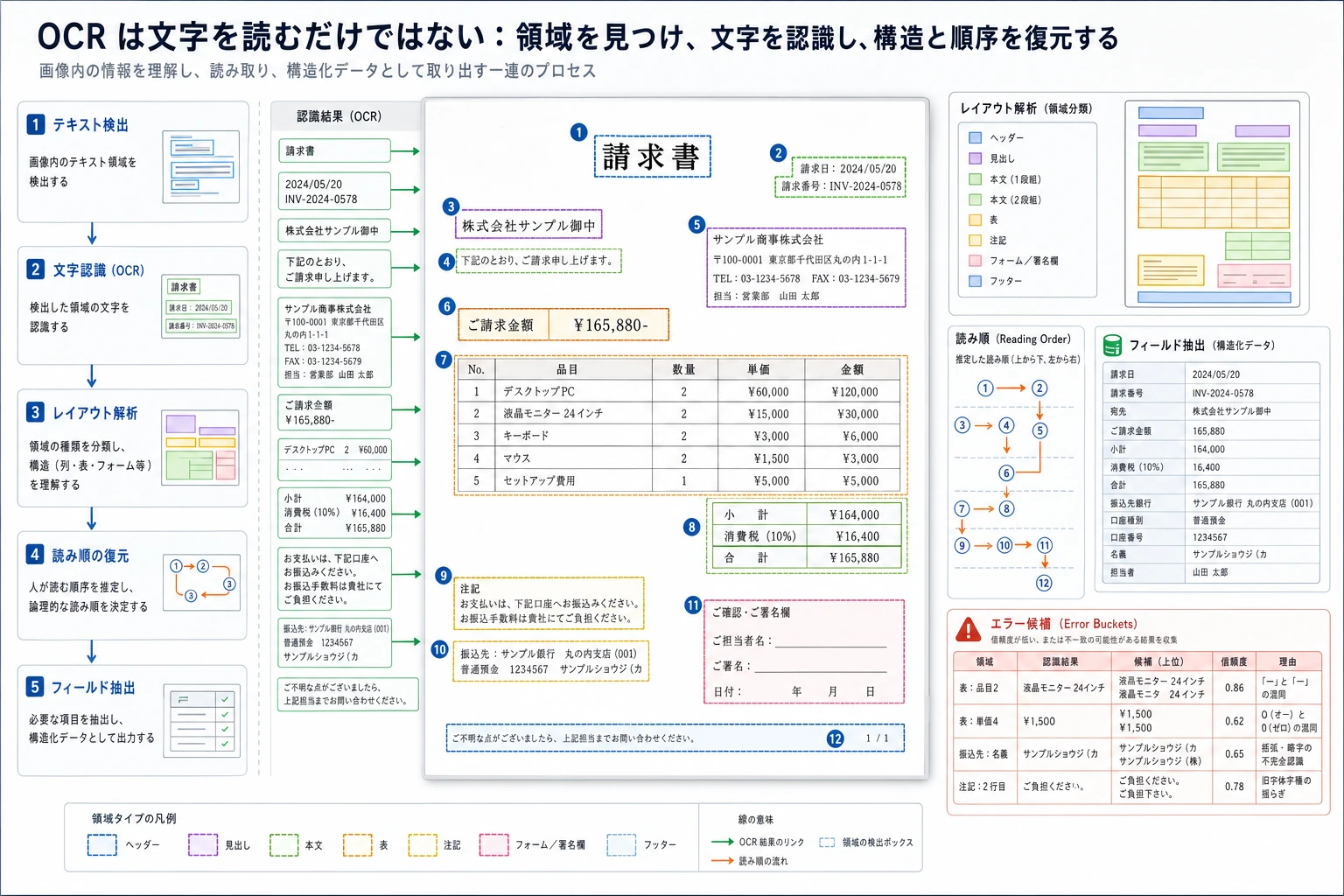
| 1 | OCR | text、layout、fields、confidence、failure samples を抽出する |
| 2 | Face | faces を検出し、threshold、privacy、bias risks を説明する |
| 3 | Video | frames をまたいで events を追跡し、temporal failures を記録する |
| 4 | 3D vision | depth、point cloud、geometry、sensor assumptions を説明する |
1 方向を選び、input/output を定義し、minimum project を動かし、failure cases と usage boundaries を文書化できれば、この章は合格です。
確認の考え方と解説
- 合格レベルの答えでは、task を class label、bounding box、mask、OCR text、embedding、video event など正しい視覚出力に対応づけます。
- 証拠には、rendered visual artifact と、metric または定性的な error note を含めます。
- class confusion、missed object、bad mask、lighting shift、domain shift、annotation quality など、失敗モードを1つ説明できればよいです。
このページを終えたら、この evidence card を残します。
- シナリオ境界
- face、video、OCR、3D、medical、または別の vision シナリオ
- 入力サンプル
- ソース画像/フレーム/文書と期待される出力タイプ
- 結果成果物
- 抽出テキスト、追跡イベント、深度の手がかり、診断フラグ、またはレビュー注記
- 失敗確認
- プライバシー、照明、時間的ドリフト、レイアウト、キャリブレーション、またはドメインリスク
- 期待される成果
- 指標または人手レビューのメモを含むシナリオ固有のアーティファクト