10.5.5 3Dビジョン入門【選択】
- 深度、点群、多視点幾何の基本的な直感を理解する
- 3Dビジョンが2Dより難しい理由を理解する
- 実行できる例を通して、深度推定の最小限の直感を身につける
- 3Dビジョンのよくある応用場面を知る
まずは全体像をつかもう
Section titled “まずは全体像をつかもう”3Dビジョンを初心者向けに理解するなら、「1次元増えた」と考えるより、どこが難しくなるのかを見るほうが大事です。
flowchart LR A["2D ビジョン"] --> B["何があるか、どこにあるかがわかる"] C["3D ビジョン"] --> D["どれくらい遠いか、向きはどうか、空間構造はどうかまで知りたい"]この節で本当に身につけてほしいのは、次の2点です。
- 平面の理解と空間の理解の違い
- 深度、点群、多視点幾何がそれぞれ何を解決するのか
初心者にわかりやすい全体のたとえ
Section titled “初心者にわかりやすい全体のたとえ”2Dと3Dの違いは、こんなふうに考えるとわかりやすいです。
- 2Dは旅行写真を見るようなもの
- 3Dは実際にその場に立って、人がどれくらい離れているか、机がどれくらい高いか、車が左前にあるか右前にあるかを知りたい感じ
つまり、3Dビジョンで新しく重要になるのは、
- 空間関係そのものを気にすること
です。
一、3Dビジョンでいちばん大事な新しい問題は何か?
Section titled “一、3Dビジョンでいちばん大事な新しい問題は何か?”2D画像では、多くの場合は次のことを気にします。
- カテゴリ
- 位置
3Dビジョンでは、さらに次のことも気にします。
- 距離
- 体積
- 空間構造
たとえで理解する
Section titled “たとえで理解する”2Dは地図のスクリーンショットを見る感じに近いです。 3Dは本当にその場に立っていて、次のことを知りたい感じです。
- この物体はどれくらい離れているか
二、よく出る3Dビジョンの概念
Section titled “二、よく出る3Dビジョンの概念”深度(Depth)
Section titled “深度(Depth)”各点がカメラからどれくらい離れているか。
点群(Point Cloud)
Section titled “点群(Point Cloud)”シーンを、3次元座標を持つたくさんの点で表したもの。
複数の視点の対応関係を使って、3次元構造を復元する考え方。
三、まずは最小限の深度の直感を見てみよう
Section titled “三、まずは最小限の深度の直感を見てみよう”def estimate_depth(focal_length, baseline, disparity): if disparity == 0: return float("inf") return focal_length * baseline / disparity
focal_length = 800baseline = 0.12
for disparity in [40, 20, 10]: depth = estimate_depth(focal_length, baseline, disparity) print({"disparity": disparity, "depth": round(depth, 4)})実行結果の例:
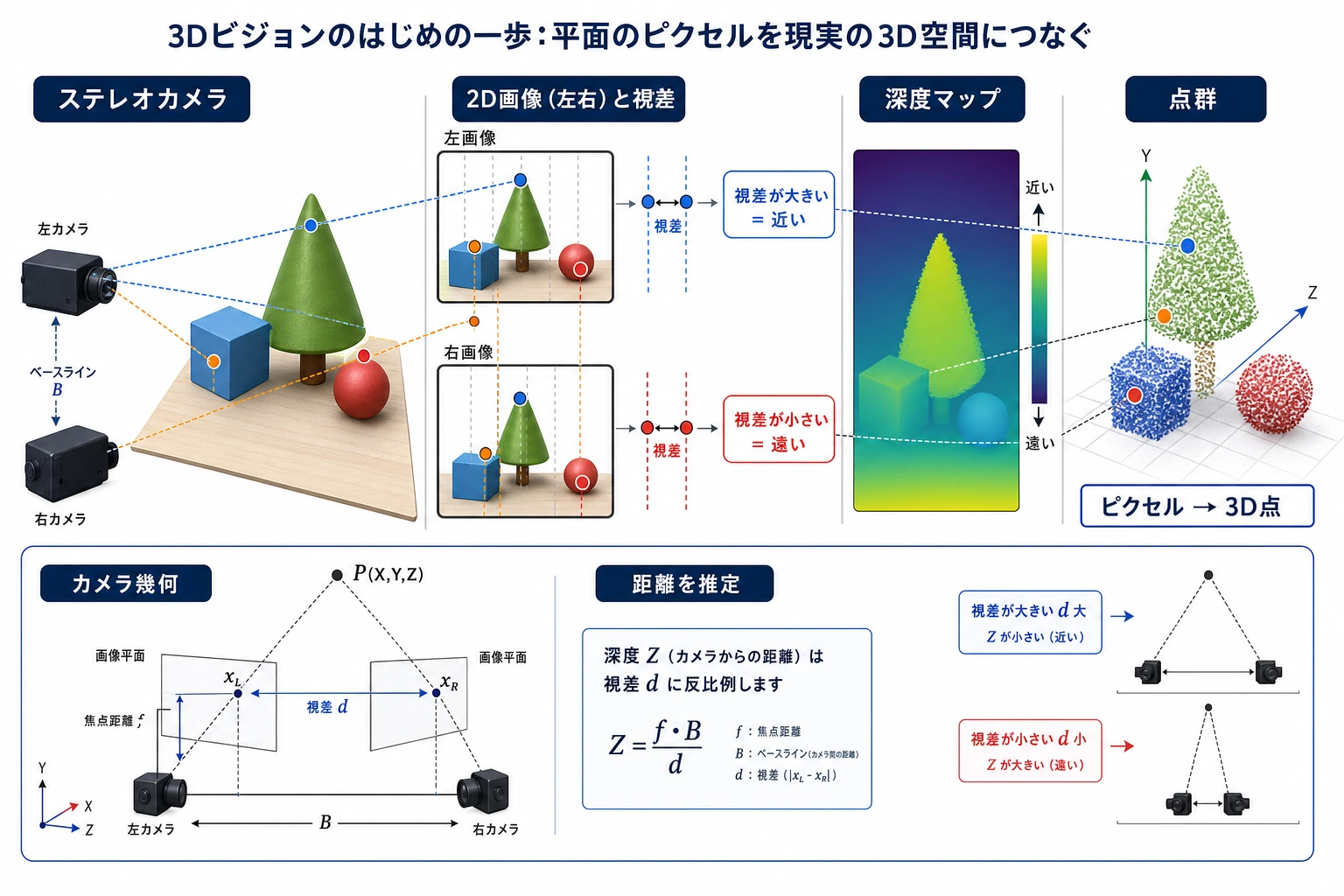
{'disparity': 40, 'depth': 2.4}{'disparity': 20, 'depth': 4.8}{'disparity': 10, 'depth': 9.6}視差が小さくなるほど、推定される depth は大きくなります。ステレオ幾何を詳しく学ぶ前に、まずこの直感を押さえてください。
この例でいちばん伝えたいことは?
Section titled “この例でいちばん伝えたいことは?”これは、ステレオビジョンのいちばん大事な直感を表しています。
- 視差が大きいほど、ふつうは近い
- 視差が小さいほど、ふつうは遠い
なぜこれが大事なのか?
Section titled “なぜこれが大事なのか?”画像の中の点が、初めて現実の3次元空間とつながるからです。
初心者が3Dビジョンを学ぶとき、まず覚えるべき3つは?
Section titled “初心者が3Dビジョンを学ぶとき、まず覚えるべき3つは?”-
深度 まずは「カメラからどれくらい離れているか」を理解する。
-
点群 3Dの世界は、たくさんの空間点で表せると理解する。
-
視差 複数視点でなぜ空間距離が復元できるのかを理解する。
さらに最小限の「深度から点を復元する」例
Section titled “さらに最小限の「深度から点を復元する」例”pixels = [ {"u": 10, "v": 20, "z": 2.0}, {"u": 12, "v": 21, "z": 2.5},]
def to_point(pixel): return (pixel["u"] * pixel["z"], pixel["v"] * pixel["z"], pixel["z"])
points = [to_point(pixel) for pixel in pixels]print(points)実行結果の例:
[(20.0, 40.0, 2.0), (30.0, 52.5, 2.5)]これは簡略化した point cloud の直感です。各画像点が depth を持つと、その点を 3D 空間上の点として想像できます。
この例は厳密なカメラモデルではありません。 ただし、初心者がまず直感をつかむには役立ちます。
- すでに深度がわかっていれば
- 画像の中の点を、空間の点として考え直せる
これが「点群っぽさ」を最初に理解するいちばん簡単な入口です。
四、3Dビジョンはなぜ難しいのか?
Section titled “四、3Dビジョンはなぜ難しいのか?”データを集めるのが難しい
Section titled “データを集めるのが難しい”2D画像は集めやすいですが、 3Dのラベルや深度データは、ふつうもっと高価です。
幾何関係が複雑
Section titled “幾何関係が複雑”見た目だけを処理するのではなく、 次のようなものも扱う必要があります。
- カメラパラメータ
- 視点の変化
- 空間的一貫性
可視化とデバッグも難しい
Section titled “可視化とデバッグも難しい”2次元画像の誤りはすぐ見つけやすいですが、 3次元構造の誤りは目で見てもわかりにくいことが多いです。
五、よくある勘違い
Section titled “五、よくある勘違い”勘違い1:3Dビジョンは「1次元増える」だけ
Section titled “勘違い1:3Dビジョンは「1次元増える」だけ”それだけではありません。 新しい幾何学的な問題が増えます。
勘違い2:2Dがうまくできれば自然に3Dもできる
Section titled “勘違い2:2Dがうまくできれば自然に3Dもできる”役立ちはしますが、空間幾何の直感は別に補う必要があります。
勘違い3:最初から複雑な3Dネットワークを使えばよい
Section titled “勘違い3:最初から複雑な3Dネットワークを使えばよい”より安定したやり方は、まず次をしっかり固めることです。
- 深度
- 視差
- 点群
最初に3Dプロジェクトをやるときの、いちばん安定した順番
Section titled “最初に3Dプロジェクトをやるときの、いちばん安定した順番”だいたい次の順番がよいです。
- まずは単一目的の小さな場面を選ぶ
- まず深度と視差を理解する
- 2次元の点と3次元の点の対応を理解する
- それから点群や多視点幾何に進む
- 最後に、より複雑な再構成や3D検出を見る
こうすると、最初から複雑な3Dネットワークを読むより、ずっと安定します。
このページを終えたら、この evidence card を残します。
- シナリオ境界
- face、video、OCR、3D、medical、または別の vision シナリオ
- 入力サンプル
- ソース画像/フレーム/文書と期待される出力タイプ
- 結果成果物
- 抽出テキスト、追跡イベント、深度の手がかり、診断フラグ、またはレビュー注記
- 失敗確認
- プライバシー、照明、時間的ドリフト、レイアウト、キャリブレーション、またはドメインリスク
- 期待される成果
- 指標または人手レビューのメモを含むシナリオ固有のアーティファクト
この節で持つべき正しい学習期待
Section titled “この節で持つべき正しい学習期待”この節の目的は、すぐに複雑な3次元再構成まで行くことではありません。 まず本当に気づいてほしいのは、次のことです。
- 3Dビジョンは2Dビジョンより空間幾何の問題が増える
- そのため、データ、モデリング、評価、デバッグの難しさにも影響する
この節でいちばん大事なのは、次の判断を持つことです。
3Dビジョンの本当の価値は、画像理解を平面から空間構造へ広げることにある。そしてその分、2Dビジョンより1層多い幾何学的な難しさがある。
この節で特に持ち帰るべきこと
Section titled “この節で特に持ち帰るべきこと”- 3Dビジョンは「1次元増える」だけではない
- 深度、視差、点群は、まず固めるべき3つの直感
- 先に空間感覚を学んでから複雑なモデルを見るほうが、ずっと安定する
これをプロジェクトにするなら、何を見せるとよいか
Section titled “これをプロジェクトにするなら、何を見せるとよいか”- 小さな深度推定、またはステレオの例
- 深度マップと元画像の比較
- 画像上の点から空間上の点への最小限の可視化
- 「近い/遠い」の判断ミスの例
こうすると、ただ「3Dビジョンをやりました」と言うより、ずっと説得力があります。
disparityを変えて、深度がどう変わるか観察してみましょう。- 3Dビジョンが2Dビジョンより幾何の直感に強く依存するのはなぜですか?
- 点群が3D表現として自然だと言えるのはなぜですか?
- どんな応用が、2D検出だけでは足りず、3Dビジョンに強く依存するでしょうか?
参考実装と解説
- stereo vision の直感では、depth は disparity とおおよそ反比例します。disparity が大きいほど近く、小さいほど遠く、ほぼ 0 では不安定です。
- 3D vision が幾何に強く依存するのは、appearance だけでなく、camera model、depth、coordinate、scale、calibration、pose を考える必要があるからです。
- point cloud は、見えている 3D 表面を
(x, y, z)の点として直接保存できるため、とても自然な表現です。色や intensity を持つこともあります。 - robotics、自動運転、AR、mapping、measurement、grasping、collision avoidance などは、2D box だけでなく 3D 構造に依存します。