10.3.5 検出実践
- 最小限の物体検出プロジェクトを定義できるようになる
- 検出プロジェクトにおけるアノテーション、枠のマッチング、評価ロジックを理解する
- 実行可能な例を通して IoU ベースの評価感覚を身につける
- 検出プロジェクトの見せ方の土台を作る
まずは全体図を作ろう
Section titled “まずは全体図を作ろう”もしあなたが検出の概要、古典的な検出器、YOLO まで学び終えたなら、この節は自然な続きになります。
- これまでに、検出タスクが何を解決しているかは分かっている
- ここでは「これを本当にプロジェクトにするなら、最初の一歩は何か」を考える
なので、この節で本当に重要なのは新しいモデルではなく、次の点です。
- クラス定義
- アノテーション規約
- 評価基準
- 失敗例の振り返り
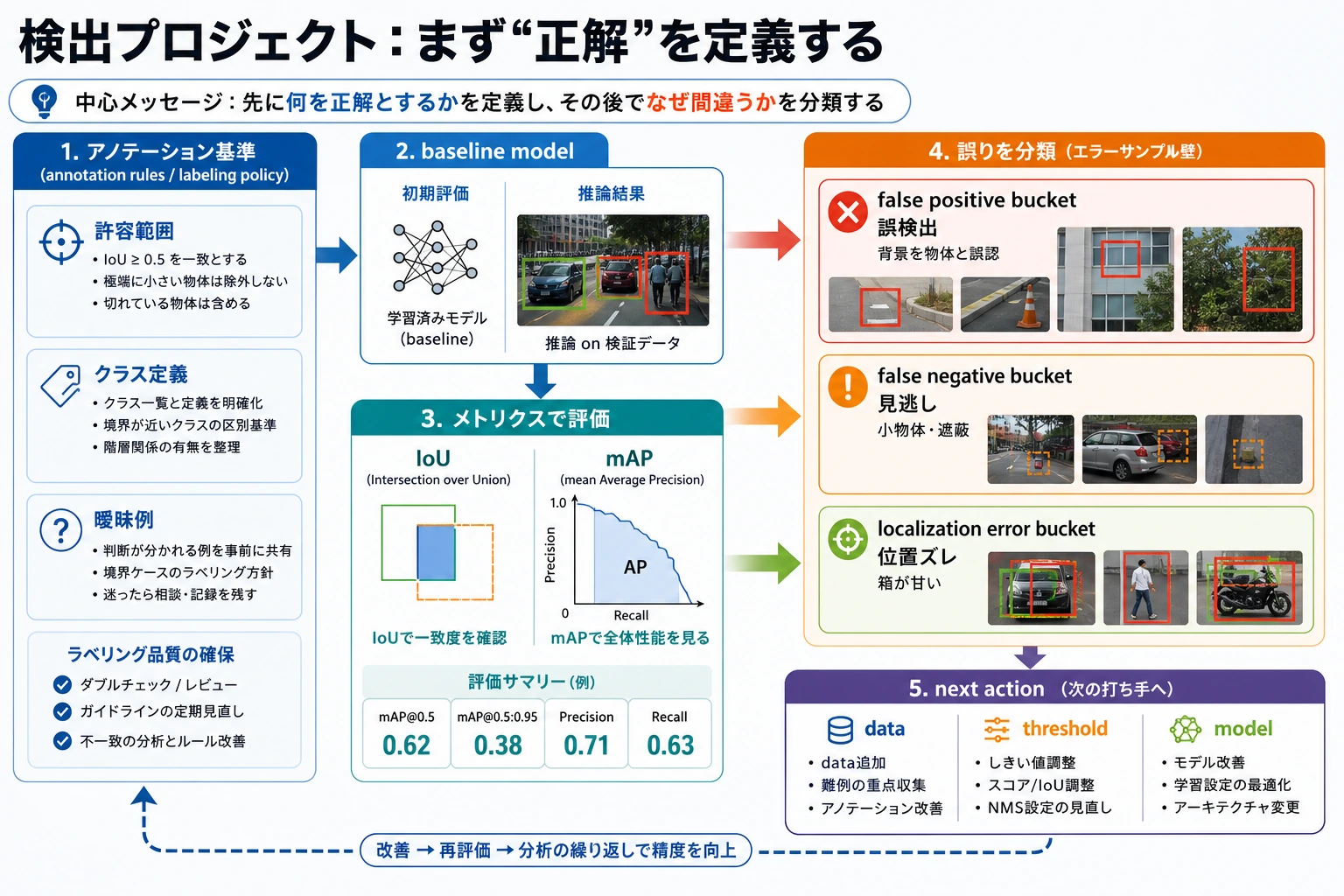
検出実践の理解順は、「先にモデルを学習する」ではなく、まずプロジェクトの閉ループをはっきり見ることです。
flowchart LR A["クラスと境界を定義する"] --> B["アノテーション規約を統一する"] B --> C["まず baseline を作る"] C --> D["IoU / mAP で評価する"] D --> E["見逃しと誤検出を分析する"]つまり、この節が本当に解決したいのは次のことです。
- 検出プロジェクトはどう進めるべきか
- どこがモデル構造より先に問題になりやすいか
一、検出プロジェクトで最初に決めることは?
Section titled “一、検出プロジェクトで最初に決めることは?”クラスの境界
Section titled “クラスの境界”たとえば防犯シーンでは、まずは次のように絞ることがあります。
- person
- helmet
最初から全部の対象を入れる必要はありません。
アノテーション規約
Section titled “アノテーション規約”次の点を最初に明確にする必要があります。
- 枠はどれくらいぴったり付けるか
- どう遮蔽を扱うか
- 小さな対象をどう数えるか
少なくとも次を明確にしておきましょう。
- IoU の閾値
- 再現率 / 適合率
初めて検出プロジェクトをやるとき、どんな題材が安定しやすい?
Section titled “初めて検出プロジェクトをやるとき、どんな題材が安定しやすい?”安定しやすい題材には、だいたい次の特徴があります。
- クラス数が多すぎない
- 対象の定義がはっきりしている
- 誤検出と見逃しを目で理解しやすい
そのため、初めてプロジェクトを作るなら、 「少ないクラス、明確な定義、説明しやすさ」が、 「派手さ」より大切なことが多いです。
なぜこの段階が「先にモデルを選ぶ」より重要なの?
Section titled “なぜこの段階が「先にモデルを選ぶ」より重要なの?”最初に次のことが固まっていないと、
- クラス境界
- アノテーションルール
- 枠の定義
- IoU の閾値
あとでどれだけモデル比較をしても、結局は曖昧な基準の上で空回りしてしまうからです。
二、まずは最小のマッチング評価を動かしてみよう
Section titled “二、まずは最小のマッチング評価を動かしてみよう”ground_truth = [ {"label": "person", "box": (10, 10, 30, 50)}, {"label": "helmet", "box": (14, 8, 24, 18)},]
predictions = [ {"label": "person", "box": (11, 12, 31, 48), "score": 0.92}, {"label": "helmet", "box": (15, 9, 23, 17), "score": 0.81}, {"label": "helmet", "box": (40, 40, 50, 50), "score": 0.30},]
def iou(box_a, box_b): ax1, ay1, ax2, ay2 = box_a bx1, by1, bx2, by2 = box_b
inter_x1 = max(ax1, bx1) inter_y1 = max(ay1, by1) inter_x2 = min(ax2, bx2) inter_y2 = min(ay2, by2)
inter_w = max(0, inter_x2 - inter_x1) inter_h = max(0, inter_y2 - inter_y1) inter_area = inter_w * inter_h
area_a = (ax2 - ax1) * (ay2 - ay1) area_b = (bx2 - bx1) * (by2 - by1) union = area_a + area_b - inter_area return inter_area / union if union else 0.0
matches = []for pred in predictions: best_iou = 0.0 best_gt = None for gt in ground_truth: if gt["label"] != pred["label"]: continue cur_iou = iou(pred["box"], gt["box"]) if cur_iou > best_iou: best_iou = cur_iou best_gt = gt matches.append( { "label": pred["label"], "score": pred["score"], "best_iou": round(best_iou, 4), "matched": best_iou >= 0.5, } )
print(matches)実行結果の例:
[{'label': 'person', 'score': 0.92, 'best_iou': 0.8182, 'matched': True}, {'label': 'helmet', 'score': 0.81, 'best_iou': 0.64, 'matched': True}, {'label': 'helmet', 'score': 0.3, 'best_iou': 0.0, 'matched': False}]この出力は行ごとに読みます。最初の2つの予測は、同じラベルの正解ボックスと IoU 0.5 以上で一致しています。最後の helmet 予測は対応する正解 helmet ボックスがないため、誤検出です。
このコードでいちばん大事なところは?
Section titled “このコードでいちばん大事なところは?”このコードは、検出評価が次のようなものではないことを見せてくれます。
- ラベルが合っていればよい
そうではなく、
- クラスが合っていること
- 枠も十分に正確であること
が必要です。
なぜこれが多くの検出プロジェクトの核心なの?
Section titled “なぜこれが多くの検出プロジェクトの核心なの?”実際の検出結果の良し悪しは、 最終的にはしばしば次の点に表れます。
- マッチング閾値
- 枠の品質
なぜ検出プロジェクトでは「誤検出 / 見逃し」の視点が特に大事なの?
Section titled “なぜ検出プロジェクトでは「誤検出 / 見逃し」の視点が特に大事なの?”検出システムは、「正しい / 間違い」の2種類だけではありません。 もっとよくあるのは次のようなケースです。
- 枠がずれている
- 対象を見逃している
- 余計な枠を出している
だからこそ、検出プロジェクトを見せるときは、成功例だけを数枚並べるだけでは不十分です。
初めて検出プロジェクトをやるとき、まず分けるべきミスは?
Section titled “初めて検出プロジェクトをやるとき、まず分けるべきミスは?”とても実用的な分類は、次の3つです。
-
見逃し 目の前に対象があるのに、システムが出力しない。
-
誤検出 対象がないのに、出力してしまう。
-
位置ずれ クラスは合っているが、枠のずれが大きい。
この3つを分けると、その後の改善方向がかなり見えやすくなります。
三、検出プロジェクトで最もつまずきやすい点
Section titled “三、検出プロジェクトで最もつまずきやすい点”アノテーション基準が一致していない
Section titled “アノテーション基準が一致していない”これは学習と評価の両方を一気に乱してしまいます。
小さな対象や遮蔽を個別に分析していない
Section titled “小さな対象や遮蔽を個別に分析していない”多くのシステムは、このような場面で性能がはっきり下がります。
きれいな画像を1〜2枚だけ見せる
Section titled “きれいな画像を1〜2枚だけ見せる”本当のプロジェクトでは、次のような点を見せるべきです。
- どんな状況で見逃しやすいか
- どんな状況で誤検出しやすいか
四、初心者がそのまま真似しやすい進め方
Section titled “四、初心者がそのまま真似しやすい進め方”おすすめは次の順番です。
- まずクラスとアノテーションルールを決める
- 次にサンプリングしてアノテーション品質を確認する
- まず最小限の baseline を作る
- そのあと IoU / mAP の評価基準を統一する
- 最後に典型的な見逃し / 誤検出を選んで分析する
作品集として見せるなら、何を出すとよい?
Section titled “作品集として見せるなら、何を出すとよい?”1枚の「予測結果画像」だけを見せるより、次の内容のほうがずっと価値があります。
- クラス定義とアノテーションルール
- baseline の IoU / mAP
- 典型的な誤検出と見逃しの例
- 失敗をどう説明するか
- 次にデータ、閾値、モデルのどれを優先して改善するか
このページを終えたら、この evidence card を残します。
- 入力画像
- 正解または期待される対象を含む検出サンプル
- 予測
- バウンディングボックス、ラベル、信頼度スコア、IoU、しきい値設定
- 指標
- precision/recall、mAP、false positives、false negatives
- 失敗確認
- 小さな物体、重なり、NMS、ラベル品質の低さ、または信頼度閾値
- 期待される成果
- 注釈付き画像と、検出メトリクスまたはエラーバケット
この節でいちばん大事なのは、プロジェクトの視点を持つことです。
検出プロジェクトの鍵は、モデル名だけではなく、クラス定義、アノテーション規約、枠レベルの評価方法が明確かどうかです。
この節で必ず持ち帰りたいこと
Section titled “この節で必ず持ち帰りたいこと”- 検出プロジェクトは、まずアノテーションと評価のプロジェクトであり、その次にモデルのプロジェクトである
- IoU の閾値とアノテーション基準は、「検出が正しいか」をどう判断するかに直接影響する
- 誤検出 / 見逃しの分析は、検出プロジェクトで見せる価値が高い部分のひとつ
ひとことで言うなら、次のとおりです。
検出プロジェクトの本当の難しさは、モデルを動かすことではなく、「何をもって検出成功とするか」をはっきり定義することです。
- IoU 閾値を
0.7に変更して、マッチング結果がどう変わるか見てみましょう。 - 考えてみましょう。なぜ検出プロジェクトは分類プロジェクトより、明確なアノテーション規約に強く依存するのでしょうか?
- もしプロジェクトで小さな対象をよく見逃すなら、データ、入力解像度、モデル構造のどれを先に確認しますか?
- この検出プロジェクトを作品集としてどうまとめますか?
プロジェクト参考とレビュー観点
- IoU しきい値を
0.7にすると、matching はより厳しくなります。0.5では true positive だった box が、false positive や false negative になることがあります。 - 検出が annotation standard に強く依存するのは、box 自体がラベルの一部だからです。box のルールが少し違うだけで IoU や mAP が変わります。
- 小物体の見逃しが多い場合は、まずデータ、アノテーション品質、入力 resolution を確認します。物体が欠けている、誤ラベル、または縮小で消えているなら、モデル変更だけでは根本解決になりません。
- ポートフォリオ化するなら、クラス定義、annotation 例、baseline 指標、典型的な false positive / missed detection、次の改善計画を含めます。