10.3.4 YOLOシリーズ
- YOLO がどの種類の検出器かを理解する
- 単段階検出と二段階検出の主な違いを理解する
- 信頼度、ボックスの選別、NMS の基本的な役割を理解する
- 実務導入における YOLO の価値を判断できるようにする
一、YOLO の核心アイデアは何か?
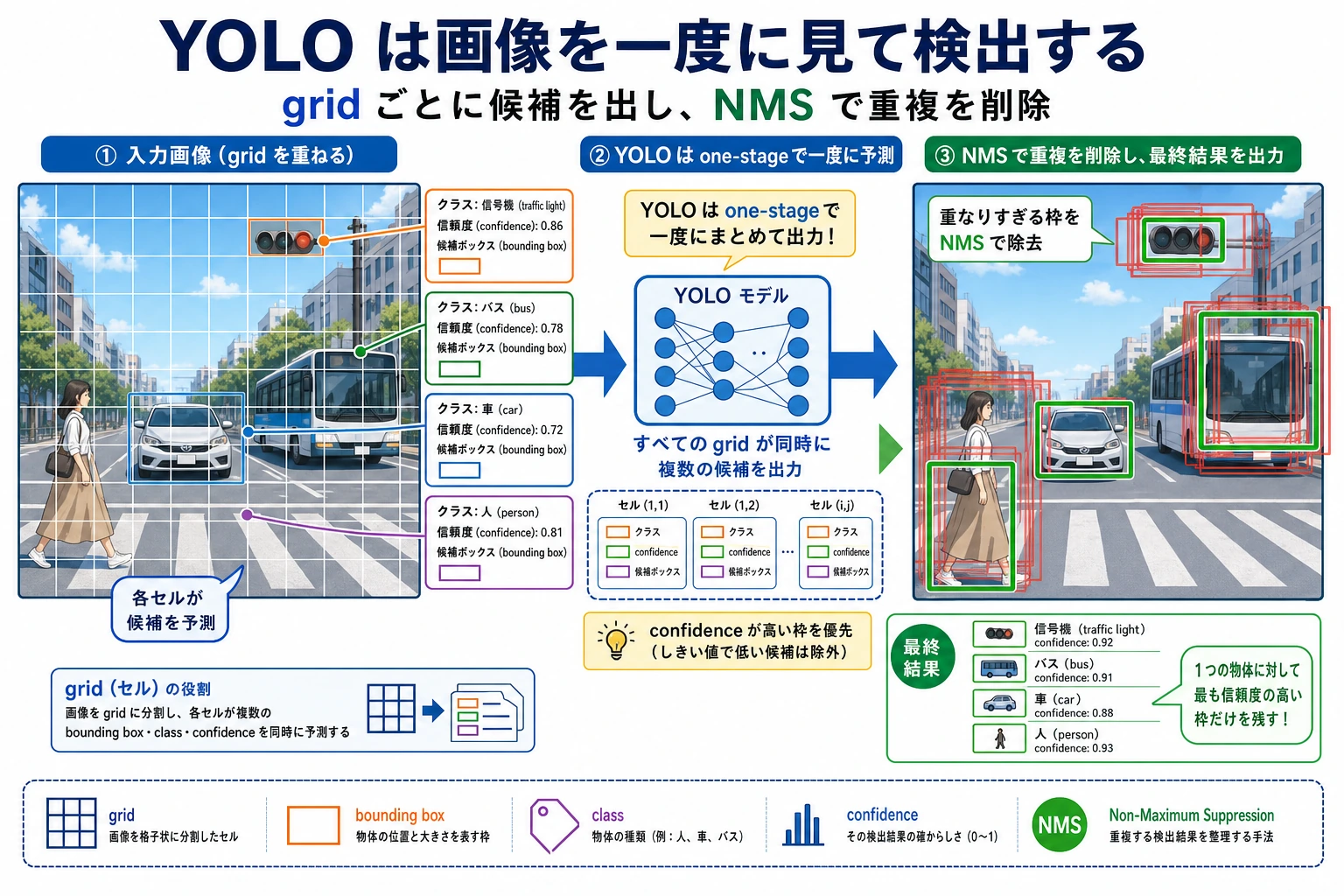
Section titled “一、YOLO の核心アイデアは何か?”YOLO がやりたいことは次の通りです:
- 2段階に分けない
- 画像から一度でクラスとボックスを直接出力する
なぜこれが魅力的なのか?
Section titled “なぜこれが魅力的なのか?”なぜなら、次のものを減らせるからです:
- 追加の proposal 段階
- より複雑な検出パイプライン
そのため、より実現しやすくなります:
- リアルタイム
二段階検出は、まず怪しい領域に印を付けてから、1つずつ確認するイメージです。 YOLO はもっと、一目で見渡して同時に次のことを返す感じです:
- どこに対象があるか
- それが何か
二、YOLO の出力はだいたいどんな形か?
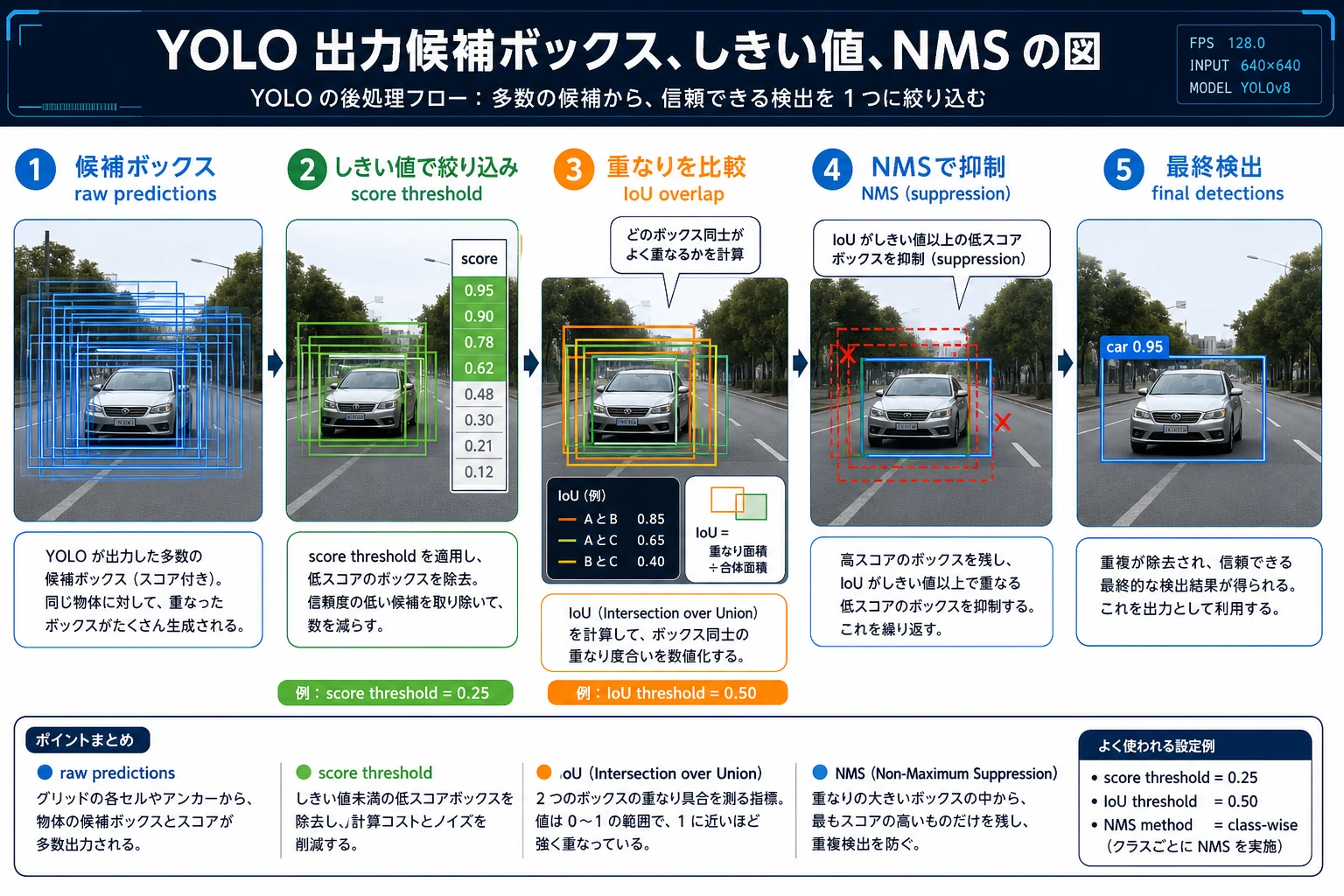
Section titled “二、YOLO の出力はだいたいどんな形か?”通常は、候補ボックスの集合としてざっくり理解できます。それぞれの候補には次の情報が付きます:
- クラス
- 信頼度
- 境界ボックスの座標
その後、選別と NMS によって最終結果を得ます。
初学者向けの、もっと分かりやすいたとえ
Section titled “初学者向けの、もっと分かりやすいたとえ”まず YOLO を次のように考えてみましょう:
- モデルがまず画像全体を走査する
- その後、「何かありそうな場所、何っぽいか、ボックスはどこか」を一気に返す
これは二段階検出とはかなり違います。 二段階検出は次のようなイメージです:
- まずあちこちで怪しい領域を囲む
- それから各領域を細かく調べる
一方 YOLO は次のような感じです:
一通り見終わったら、候補対象をまとめて返す。
初学者が最初に覚えるとよい判断表
Section titled “初学者が最初に覚えるとよい判断表”| 今気になっていること | まず見るとよい層 |
|---|---|
| なぜ速いのか | 単段階の流れと短い推論経路 |
| なぜたくさんボックスが出るのか | 候補ボックスの出力 |
| なぜ結果が重なるのか | NMS としきい値 |
| なぜリアルタイム案件で使われやすいのか | 実装しやすさとエコシステムの成熟度 |
この表は初心者にとても役立ちます。YOLO を「バージョン名の集合」ではなく、いくつかの具体的な問題として見られるようになるからです。
最小限の「候補ボックス出力」の例
Section titled “最小限の「候補ボックス出力」の例”次の例は、実際の YOLO ネットワークを再現しているわけではありません。 でも、すごく大事な感覚をつかむ助けになります:
- モデルの出力は通常「最終答え」ではない
- いくつかのスコア付き候補ボックスである
predictions = [ {"class": "person", "score": 0.93, "box": (12, 18, 80, 160)}, {"class": "person", "score": 0.87, "box": (15, 20, 82, 158)}, {"class": "dog", "score": 0.78, "box": (120, 60, 190, 150)},]
for pred in predictions: print(pred)実行結果の例:
{'class': 'person', 'score': 0.93, 'box': (12, 18, 80, 160)}{'class': 'person', 'score': 0.87, 'box': (15, 20, 82, 158)}{'class': 'dog', 'score': 0.78, 'box': (120, 60, 190, 150)}最初の2つのボックスはどちらも person の候補で、位置も近いです。次の NMS 例は、まさにこのような状況を処理するためのものです。
この出力でまず覚えるべきなのはフィールド名ではなく、次の点です:
- 単段階検出では、もともと候補がたくさん出やすい
- 後処理は検出フローの一部である
三、まずは最小限の NMS の直感を見てみよう
Section titled “三、まずは最小限の NMS の直感を見てみよう”def iou(box_a, box_b): ax1, ay1, ax2, ay2 = box_a bx1, by1, bx2, by2 = box_b
inter_x1 = max(ax1, bx1) inter_y1 = max(ay1, by1) inter_x2 = min(ax2, bx2) inter_y2 = min(ay2, by2)
inter_w = max(0, inter_x2 - inter_x1) inter_h = max(0, inter_y2 - inter_y1) inter_area = inter_w * inter_h
area_a = (ax2 - ax1) * (ay2 - ay1) area_b = (bx2 - bx1) * (by2 - by1) union = area_a + area_b - inter_area return inter_area / union if union > 0 else 0.0
predictions = [ {"box": (10, 10, 30, 30), "score": 0.95}, {"box": (12, 12, 31, 31), "score": 0.88}, {"box": (60, 60, 90, 90), "score": 0.91},]
def nms(preds, iou_threshold=0.5): preds = sorted(preds, key=lambda x: x["score"], reverse=True) kept = []
while preds: best = preds.pop(0) kept.append(best) preds = [ pred for pred in preds if iou(best["box"], pred["box"]) < iou_threshold ]
return kept
print(nms(predictions))実行結果の例:
[{'box': (10, 10, 30, 30), 'score': 0.95}, {'box': (60, 60, 90, 90), 'score': 0.91}]真ん中のボックスは、最高スコアの最初のボックスと大きく重なるため除外されます。3つ目のボックスは離れた場所にあるので、別の対象である可能性が高く、残されます。
この例でいちばん大事な価値は?
Section titled “この例でいちばん大事な価値は?”検出結果は、そのままではすぐに使えるとは限らない、ということです。 多くの場合、モデルは次のようなものを出します:
- 重なった候補ボックスがたくさんある
そこで NMS の役割は次の通りです:
- 代表的なものだけを残す
これはなぜ YOLO で特に重要なのか?
Section titled “これはなぜ YOLO で特に重要なのか?”YOLO のような単段階の流れでは、もともと候補が多く出やすいからです。 そのため、後処理による選別は検出フローの一部になります。
最小限の「しきい値で先にふるいにかける」例
Section titled “最小限の「しきい値で先にふるいにかける」例”predictions = [ {"class": "person", "score": 0.93}, {"class": "person", "score": 0.48}, {"class": "dog", "score": 0.78},]
def filter_by_score(preds, threshold=0.5): return [pred for pred in preds if pred["score"] >= threshold]
print(filter_by_score(predictions, threshold=0.5))実行結果の例:
[{'class': 'person', 'score': 0.93}, {'class': 'dog', 'score': 0.78}]スコアの低い person 候補が除外されます。実際のプロジェクトでは、この閾値を変えるだけで、見逃しと誤検出のバランスが変わります。
この例は初学者にとても向いています。次のことが分かりやすいからです:
- 検出システムは、いきなり全部の候補をそのまま描画するわけではない
- まずスコアやルールで一度ふるいにかける
四、なぜ YOLO は実務でこれほど人気なのか?
Section titled “四、なぜ YOLO は実務でこれほど人気なのか?”リアルタイム性が高い
Section titled “リアルタイム性が高い”多くの場面では、次のような要求があります:
- カメラでリアルタイム検出したい
- エッジデバイスで素早く応答したい
YOLO のような流れは、こうしたニーズにとても向いています。
構造が比較的そろっている
Section titled “構造が比較的そろっている”多くのエンジニアにとって、複雑な多段階パイプラインよりも実装しやすいです。
コミュニティと実務エコシステムが成熟している
Section titled “コミュニティと実務エコシステムが成熟している”そのため、実際のプロジェクトで優先的に試されることが多いです。
初めてリアルタイム検出を作るとき、なぜ多くのチームが YOLO を最初に試すのか?
Section titled “初めてリアルタイム検出を作るとき、なぜ多くのチームが YOLO を最初に試すのか?”YOLO は、多くの場合、次の現実的な条件を同時に満たすからです:
- 始めやすい
- 推論経路が短い
- コミュニティのモデルが多い
- デプロイ資料が多い
つまり、YOLO の魅力は精度だけではなく、 次の点にあります:
実務で「まず動くもの」を早く作りやすい。
YOLO をプロジェクトに入れるなら、まず何を見せるべきか
Section titled “YOLO をプロジェクトに入れるなら、まず何を見せるべきか”まず見せるべきなのは、単に:
- 検出結果の画像を1枚貼ること
ではなく、次のようなものです:
- baseline の検出結果
- しきい値調整の前後比較
- NMS 前後のボックス変化
- 誤検出、見逃し、小さな対象の例
こうすると、相手に伝わりやすくなります:
- 現場の検出フローを理解している
- ただ既存モデルを呼び出しただけではない
五、よくある落とし穴
Section titled “五、よくある落とし穴”誤解1:YOLO = 物体検出
Section titled “誤解1:YOLO = 物体検出”YOLO は重要な路線ですが、物体検出のすべてではありません。
誤解2:速ければ必ず最適
Section titled “誤解2:速ければ必ず最適”次の点も見る必要があります:
- 小さな対象への強さ
- ボックス位置の精度
- デプロイ上の制約
誤解3:後処理は重要ではない
Section titled “誤解3:後処理は重要ではない”NMS やしきい値設定などの後処理は、最終的な体験に直接影響します。
六、初めて YOLO プロジェクトを作るときの、いちばん安定した順番
Section titled “六、初めて YOLO プロジェクトを作るときの、いちばん安定した順番”初めて YOLO をプロジェクトに入れるなら、だいたい次の順番が安定です:
- まずクラスの境界とアノテーション規則をはっきり決める
- まずデフォルトモデルとデフォルトしきい値で baseline を出す
- まず誤検出、見逃し、小さな対象の結果を見る
- それからしきい値と NMS を調整する
- 最後に、より大きなモデルやより複雑なデータ拡張を検討する
この順番はとても重要です。初学者がやりがちなミスは次の通りだからです:
- いきなりモデルを変える
- でも baseline のどこが間違っているのかを見ていない
初学者がそのまま使える確認順
Section titled “初学者がそのまま使える確認順”YOLO プロジェクトの結果が思わしくないとき、安定した確認順は次の通りです:
- まずクラスの境界とアノテーション規則を見る
- 次に score threshold と NMS を見る
- 次に誤検出 / 見逃しがどの対象に多いかを見る
- 最後に、より大きなモデルやより複雑な拡張を検討する
この順番のほうが、バージョン番号を直接変えるより効果的なことが多いです。
このページを終えたら、この evidence card を残します。
- 入力画像
- 正解または期待される対象を含む検出サンプル
- 予測
- バウンディングボックス、ラベル、信頼度スコア、IoU、しきい値設定
- 指標
- precision/recall、mAP、false positives、false negatives
- 失敗確認
- 小さな物体、重なり、NMS、ラベル品質の低さ、または信頼度閾値
- 期待される成果
- 注釈付き画像と、検出メトリクスまたはエラーバケット
この節でいちばん大切なのは、実務的な見方を持つことです:
YOLO は、単段階でリアルタイムに向いた検出路線を代表するものです。広く使われている理由は「検出できる」からだけではなく、「実務で素早く検出結果を出しやすい」からです。
この節で持ち帰るべきこと
Section titled “この節で持ち帰るべきこと”- YOLO で最も重要なのはバージョン番号ではなく、単段階でリアルタイム志向の路線であること
- 出力は通常、候補ボックスの集合であり、後処理は検出フローの一部
- 初めてプロジェクトを作るときは、まず baseline の誤検出と見逃しを確認してから、モデルの更新を考える
- 例の
iou_thresholdを変えて、残るボックス数がどう変わるか見てみましょう。 - 自分の言葉で説明してみましょう:なぜ単段階検出はリアルタイムにしやすいのか?
- なぜ NMS は検出タスクで重要なのか?
- 考えてみましょう:どんなときに YOLO を優先して選ばないかもしれませんか?
解法と解説
- NMS では、
iou_thresholdを高くすると通常は抑制が弱くなり、残る重複 box が増えることがあります。低くすると、より強く抑制されます。 - 一段階検出は、box と class を 1 回の forward pass で直接予測するため、別の proposal 段階を持つ方式よりリアルタイム化しやすいです。
- NMS が重要なのは、detector が同じ物体に対して重なった box を多数出すことがあるからです。NMS は最も信頼できる box を残し、重複を取り除きます。
- 小物体の厳密な精度、細かな位置合わせ、強い遮蔽、または速度より高精度なレビューが重要な場合は、YOLO を最初に選ばないこともあります。