4.3.4 勾配降下法:AI の最も重要な最適化アルゴリズム
- 勾配降下法を直感で理解する――「目をつぶって山を下りる」
- 学習率の影響を理解する(大きすぎる/小さすぎる)
- ゼロから実装して勾配降下法で直線をフィットする
- BGD、SGD、Mini-batch SGD の違いを知る
- 局所最小値と鞍点を理解する
まず、学習に関する大事な期待値をお伝えします
Section titled “まず、学習に関する大事な期待値をお伝えします”この節の目的は、最適化の細かい部分を今すぐすべて完全に理解することではありません。 まずは、次のことを本当に理解することです。
- モデルはなぜ「一気に学習する」のではないのか
- そして、小さな更新を何回も重ねることで少しずつ良くなるのか
まずは地図を1枚つくろう
Section titled “まずは地図を1枚つくろう”前の2節では「関数がどう変わるかをどう知るか」を学びました。ここからは、次の問いを考えます。
どう変わるかが分かったら、どうやってパラメータを少しずつより良い位置へ動かすのか?
この節を理解できると、今後オプティマイザ、学習率、学習過程を見たときに、ただ「API を覚える」だけで終わらなくなります。
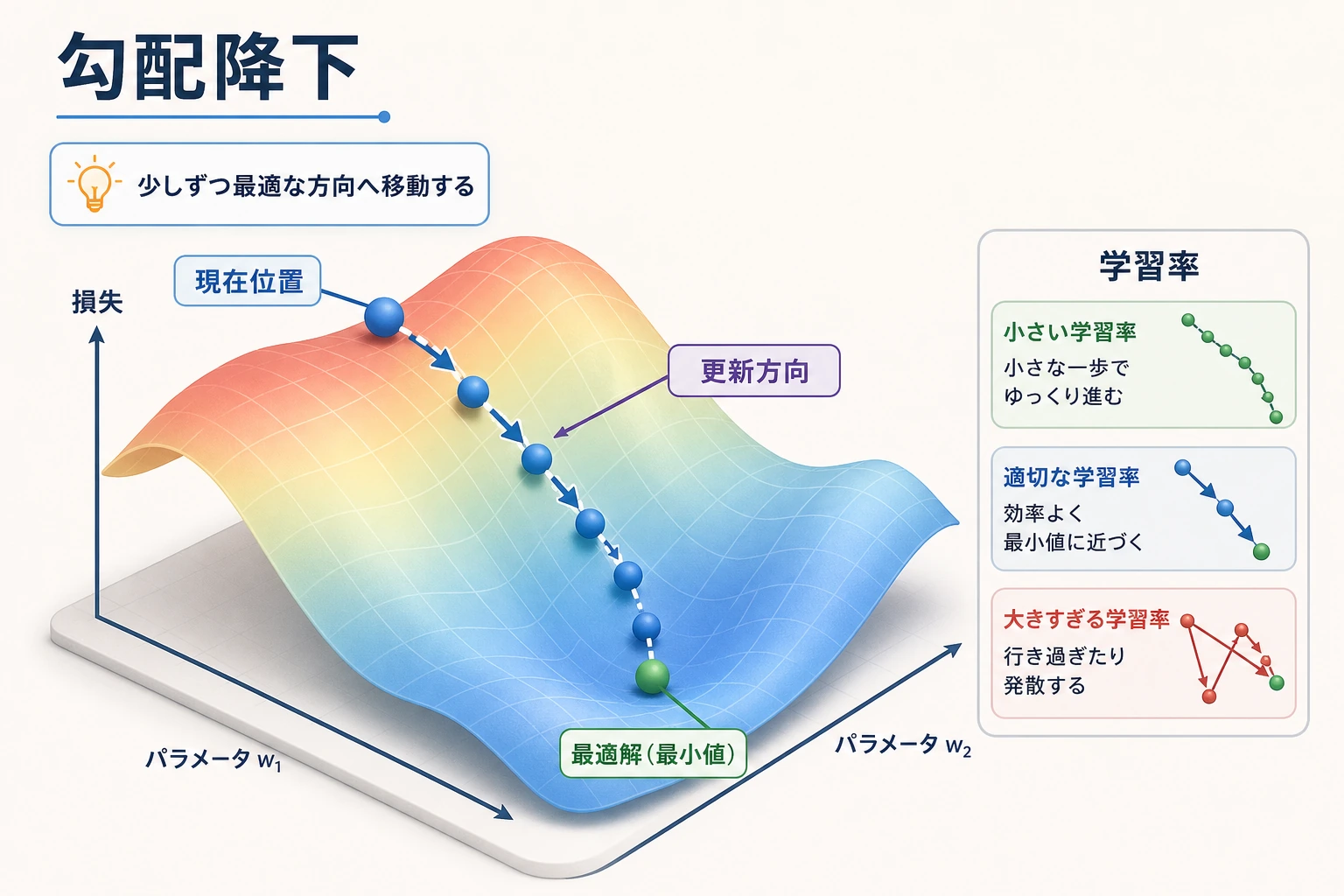
一、直感:目をつぶって山を下りる
Section titled “一、直感:目をつぶって山を下りる”山の上に立っていて、目隠しをされているとします。山のふもとの最も低い場所に行きたいとき、どうしますか?
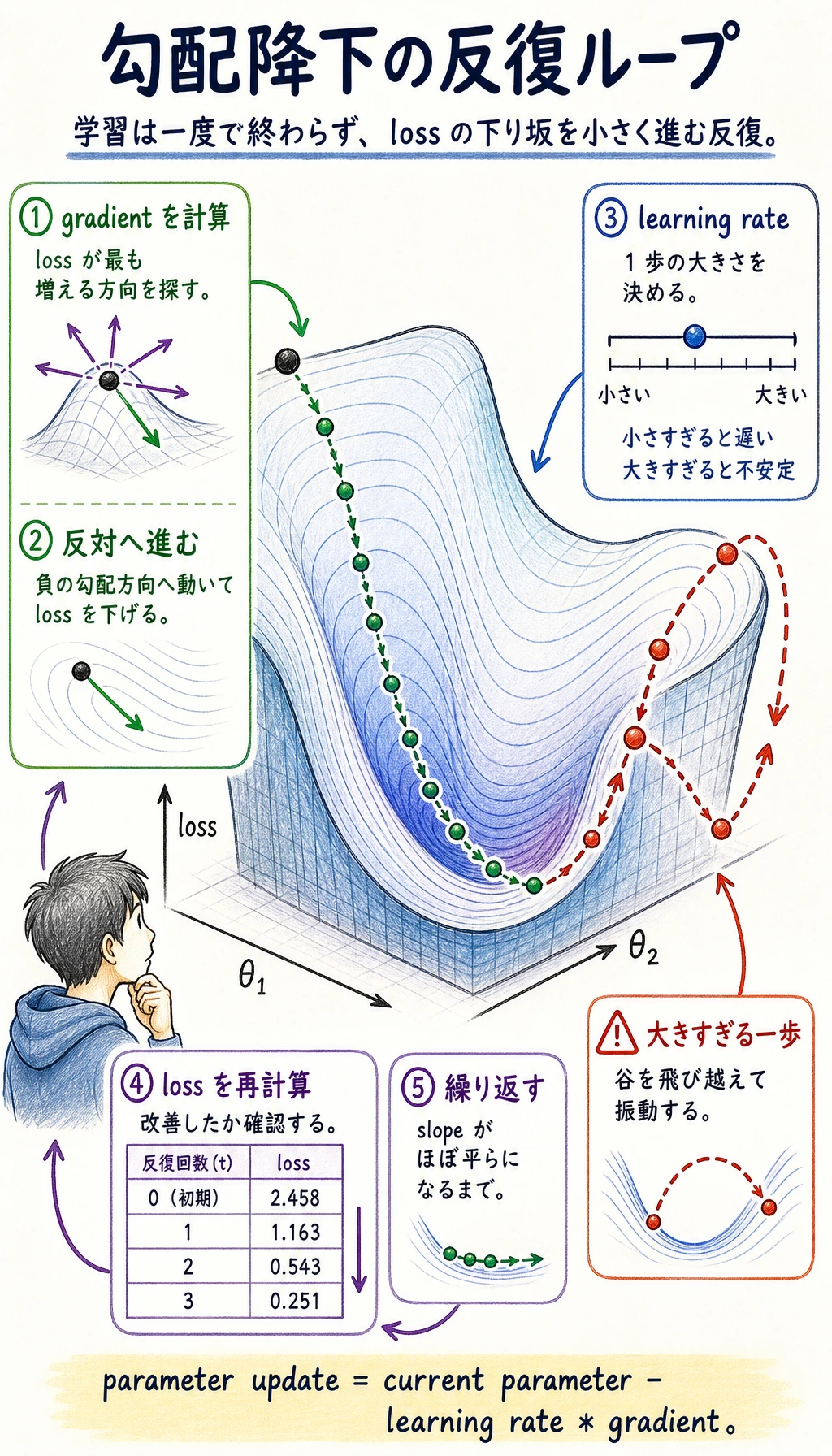
- 足で地面を感じる:どの方向がいちばん急か?(= 勾配を計算する)
- いちばん急な下り坂の方向へ1歩進む(= 負の勾配方向にパラメータを更新する)
- これを繰り返す。周りが平らに感じるまで(= 勾配がほぼ 0 になり、最小点に到達)
なぜこのたとえは初心者にとても大事なのか?
Section titled “なぜこのたとえは初心者にとても大事なのか?”それは、次の1点を先に受け入れやすくなるからです。
- モデル学習は一度で終わるものではない
- 見えない全体地図のない損失地形の中を、少しずつ低い場所へ進んでいくもの
flowchart TD A["パラメータを初期化<br/>(山の上のランダムな位置に立つ)"] --> B["勾配を計算<br/>(地面の傾きを感じる)"] B --> C["パラメータを更新<br/>w = w - lr × 勾配<br/>(下り方向へ1歩進む)"] C --> D{"収束した?<br/>勾配 ≈ 0?"} D -->|いいえ| B D -->|はい| E["最小点を見つけた!"]
style A fill:#e3f2fd,stroke:#1565c0,color:#333 style E fill:#e8f5e9,stroke:#2e7d32,color:#333二、コードから理解する
Section titled “二、コードから理解する”もっとも簡単な例:f(x) = x² の最小値を探す
Section titled “もっとも簡単な例:f(x) = x² の最小値を探す”import numpy as npimport matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS']plt.rcParams['axes.unicode_minus'] = False
# 目的関数def f(x): return x ** 2
# 導関数def df(x): return 2 * x
# 勾配降下法x = 4.0 # 初期位置lr = 0.3 # 学習率history = [x] # 軌跡を記録
for step in range(20): grad = df(x) # 勾配を計算 x = x - lr * grad # パラメータを更新 history.append(x) if step < 8: print(f"ステップ {step+1}: x = {x:.4f}, f(x) = {f(x):.6f}, 勾配 = {grad:.4f}")
print(f"\n最終結果: x = {x:.6f}, f(x) = {f(x):.10f}")下降の過程を可視化する
Section titled “下降の過程を可視化する”x_plot = np.linspace(-5, 5, 200)
plt.figure(figsize=(10, 6))plt.plot(x_plot, f(x_plot), 'steelblue', linewidth=2, label='f(x) = x²')
# 各ステップの位置を描くfor i in range(len(history) - 1): plt.plot(history[i], f(history[i]), 'ro', markersize=8, alpha=0.5) plt.annotate('', xy=(history[i+1], f(history[i+1])), xytext=(history[i], f(history[i])), arrowprops=dict(arrowstyle='->', color='red', lw=1.5))
plt.plot(history[0], f(history[0]), 'ro', markersize=12, label=f'開始点 x={history[0]}')plt.plot(history[-1], f(history[-1]), 'g*', markersize=15, label=f'終点 x={history[-1]:.2f}')
plt.xlabel('x')plt.ylabel('f(x)')plt.title('勾配降下法の過程:x=4 から出発して少しずつ最小点へ向かう')plt.legend()plt.grid(True, alpha=0.3)plt.show()三、学習率——最も重要なハイパーパラメータ
Section titled “三、学習率——最も重要なハイパーパラメータ”学習率が大きすぎる場合 vs 小さすぎる場合
Section titled “学習率が大きすぎる場合 vs 小さすぎる場合”初心者により分かりやすい例え
Section titled “初心者により分かりやすい例え”学習率は、山を下りるときの1歩の大きさのようなものです。
- 1歩が小さすぎる:進みが遅い
- 1歩が大きすぎる:谷底を飛び越えて、行ったり来たりしやすい
fig, axes = plt.subplots(1, 3, figsize=(18, 5))x_plot = np.linspace(-5, 5, 200)
for ax, lr, title in zip(axes, [0.01, 0.3, 0.95], ['小さすぎる (lr=0.01)', 'ちょうどよい (lr=0.3)', '大きすぎる (lr=0.95)']): x = 4.0 history = [x] for _ in range(30): x = x - lr * df(x) history.append(x)
ax.plot(x_plot, f(x_plot), 'steelblue', linewidth=2)
for i in range(min(len(history)-1, 20)): ax.plot(history[i], f(history[i]), 'ro', markersize=5, alpha=0.6) if i < len(history)-1: ax.plot([history[i], history[i+1]], [f(history[i]), f(history[i+1])], 'r-', alpha=0.3)
ax.set_title(f'{title}\n30 ステップ後 x={history[-1]:.4f}') ax.set_xlabel('x') ax.set_ylabel('f(x)') ax.set_ylim(-1, 30) ax.grid(True, alpha=0.3)
plt.suptitle('学習率が勾配降下法に与える影響', fontsize=14)plt.tight_layout()plt.show()| 学習率 | 挙動 | 問題 |
|---|---|---|
| 小さい(0.01) | 1歩が短すぎる | 収束が非常に遅く、何万ステップも必要になる |
| 適切(0.1〜0.5) | 安定して下がる | 理想的 |
| 大きすぎる(0.95+) | 行ったり来たりする | いつまでも収束しない可能性がある |
| 大きすぎる(>1.0) | どんどん遠ざかる | 発散する(損失が爆発する) |
四、実践:ゼロから勾配降下法で直線をフィットする
Section titled “四、実践:ゼロから勾配降下法で直線をフィットする”勾配降下法で y = wx + b をフィットし、最適な w と b を見つけます。
# データ生成:y = 2x + 3 + ノイズrng = np.random.default_rng(seed=42)n = 100X = rng.uniform(-5, 5, n)y_true = 2 * X + 3 + rng.normal(size=n) * 1.5
plt.figure(figsize=(8, 5))plt.scatter(X, y_true, alpha=0.5, s=30, color='steelblue')plt.xlabel('x')plt.ylabel('y')plt.title('データ点(真の関係:y = 2x + 3 + ノイズ)')plt.grid(True, alpha=0.3)plt.show()平均二乗誤差(MSE):
MSE = (1/n) × Σ (予測値 - 真の値)²
def predict(X, w, b): """予測関数:y = wx + b""" return w * X + b
def mse_loss(X, y, w, b): """平均二乗誤差の損失""" y_pred = predict(X, w, b) return np.mean((y_pred - y) ** 2)
def compute_gradients(X, y, w, b): """損失の w と b に関する勾配を計算する""" y_pred = predict(X, w, b) n = len(y) dw = (2/n) * np.sum((y_pred - y) * X) db = (2/n) * np.sum(y_pred - y) return dw, db勾配降下法で学習する
Section titled “勾配降下法で学習する”# パラメータを初期化w = 0.0b = 0.0lr = 0.01epochs = 200
# 学習過程を記録loss_history = []w_history = []b_history = []
for epoch in range(epochs): # 1. 損失を計算 loss = mse_loss(X, y_true, w, b) loss_history.append(loss) w_history.append(w) b_history.append(b)
# 2. 勾配を計算 dw, db = compute_gradients(X, y_true, w, b)
# 3. パラメータを更新 w = w - lr * dw b = b - lr * db
# 進捗を表示 if epoch % 40 == 0: print(f"Epoch {epoch:4d}: loss={loss:.4f}, w={w:.4f}, b={b:.4f}")
print(f"\n最終結果: w={w:.4f}, b={b:.4f}")print(f"真のパラメータ: w=2.0000, b=3.0000")学習過程を可視化する
Section titled “学習過程を可視化する”fig, axes = plt.subplots(1, 3, figsize=(18, 5))
# 1. 損失曲線axes[0].plot(loss_history, color='coral', linewidth=2)axes[0].set_xlabel('Epoch')axes[0].set_ylabel('MSE Loss')axes[0].set_title('学習損失曲線')axes[0].grid(True, alpha=0.3)
# 2. パラメータの収束過程axes[1].plot(w_history, label='w', color='steelblue', linewidth=2)axes[1].plot(b_history, label='b', color='coral', linewidth=2)axes[1].axhline(y=2.0, color='steelblue', linestyle='--', alpha=0.5, label='w の真値')axes[1].axhline(y=3.0, color='coral', linestyle='--', alpha=0.5, label='b の真値')axes[1].set_xlabel('Epoch')axes[1].set_ylabel('パラメータ値')axes[1].set_title('パラメータの収束過程')axes[1].legend()axes[1].grid(True, alpha=0.3)
# 3. フィット結果x_line = np.linspace(-5, 5, 100)axes[2].scatter(X, y_true, alpha=0.4, s=20, color='gray')axes[2].plot(x_line, 2*x_line + 3, 'g--', linewidth=2, label='真の式: y=2x+3')axes[2].plot(x_line, w*x_line + b, 'r-', linewidth=2, label=f'フィット結果: y={w:.2f}x+{b:.2f}')axes[2].set_xlabel('x')axes[2].set_ylabel('y')axes[2].set_title('フィット結果')axes[2].legend()axes[2].grid(True, alpha=0.3)
plt.tight_layout()plt.show()五、勾配降下法の3つの変種
Section titled “五、勾配降下法の3つの変種”バッチ勾配降下法(BGD)
Section titled “バッチ勾配降下法(BGD)”毎回、全データを使って勾配を計算します(上の実装が BGD です)。
# BGD:全 n 個のサンプルを使って勾配を計算dw = (2/n) * np.sum((y_pred - y) * X) # すべてのデータを使う確率的勾配降下法(SGD)
Section titled “確率的勾配降下法(SGD)”毎回、1つのサンプルだけで勾配を計算します。
# SGD:毎回 1 サンプルだけ使うrng = np.random.default_rng(seed=42)i = rng.integers(0, n)dw = 2 * (w * X[i] + b - y_true[i]) * X[i]ミニバッチ勾配降下法(Mini-batch SGD)
Section titled “ミニバッチ勾配降下法(Mini-batch SGD)”毎回、少数のデータ(たとえば 32 サンプル)を使います。最もよく使われます。
# Mini-batch SGDrng = np.random.default_rng(seed=42)batch_size = 32indices = rng.choice(n, batch_size, replace=False)X_batch = X[indices]y_batch = y_true[indices]dw = (2/batch_size) * np.sum((w * X_batch + b - y_batch) * X_batch)| 方法 | 1 回の更新で使うもの | 向いている使い方 |
|---|---|---|
| BGD | 全データ、正確な勾配 | 小規模データセットや導出の学習 |
| SGD | 1 サンプル、ノイズの大きい勾配 | 確率的な挙動や理論の理解 |
| Mini-batch | 32-512 サンプル、十分安定 | 実際の学習ループで最もよく使う |
# 3つの手法の収束曲線を比較fig, ax = plt.subplots(figsize=(10, 5))rng = np.random.default_rng(seed=42)
for method, batch_size, color in [('BGD', n, 'steelblue'), ('Mini-batch(32)', 32, 'coral'), ('SGD', 1, 'gray')]: w, b = 0.0, 0.0 lr = 0.01 losses = []
for epoch in range(200): if batch_size == n: idx = np.arange(n) else: idx = rng.choice(n, batch_size, replace=False)
X_b, y_b = X[idx], y_true[idx] y_pred = w * X_b + b
dw = (2/len(idx)) * np.sum((y_pred - y_b) * X_b) db = (2/len(idx)) * np.sum(y_pred - y_b)
w -= lr * dw b -= lr * db
losses.append(mse_loss(X, y_true, w, b))
ax.plot(losses, label=method, color=color, linewidth=2, alpha=0.7 if method != 'SGD' else 0.4)
ax.set_xlabel('Epoch')ax.set_ylabel('MSE Loss')ax.set_title('3つの勾配降下法の収束比較')ax.legend()ax.grid(True, alpha=0.3)plt.show()六、局所最小値と鞍点
Section titled “六、局所最小値と鞍点”非凸関数の難しさ
Section titled “非凸関数の難しさ”# 複数の極値を持つ関数def tricky_f(x): return x**4 - 4*x**2 + 0.5*x
def tricky_df(x): return 4*x**3 - 8*x + 0.5
x_plot = np.linspace(-2.5, 2.5, 200)
plt.figure(figsize=(10, 5))plt.plot(x_plot, tricky_f(x_plot), 'steelblue', linewidth=2)
# 異なる開始点から試すfor x0, color in [(-2.0, 'red'), (0.5, 'green'), (2.0, 'orange')]: x = x0 history = [x] for _ in range(100): x = x - 0.01 * tricky_df(x) history.append(x)
for h in history[::5]: plt.plot(h, tricky_f(h), 'o', color=color, markersize=4, alpha=0.5) plt.plot(history[0], tricky_f(history[0]), 's', color=color, markersize=10, label=f'開始点 x={x0} → 終点 x={history[-1]:.2f}')
plt.xlabel('x')plt.ylabel('f(x)')plt.title('開始点が違うと、異なる極値にたどり着くことがある')plt.legend()plt.grid(True, alpha=0.3)plt.show()解説:開始点が違うと、異なる谷底(局所最小値)に「下り着く」ことがあります。深層学習では、うれしいことに、高次元空間では局所最小値でも十分よいことが多いです。
flowchart LR A["局所最小値<br/>周囲がすべてそれより高い<br/>そこに止まっても悪くない"] B["鞍点<br/>ある方向では上がり、別の方向では下がる<br/>勾配は 0 だが最小点ではない"]
style A fill:#fff3e0,stroke:#e65100,color:#333 style B fill:#ffebee,stroke:#c62828,color:#333高次元空間では、局所最小値よりも鞍点のほうがよく現れます。現代のオプティマイザ(たとえば Adam)は、モーメンタムの仕組みによって鞍点を通り抜けやすくなります。
ここまで学んだら、次の節には何を持っていけばよい?
Section titled “ここまで学んだら、次の節には何を持っていけばよい?”勾配降下法を学んだあと、次の節へ持っていくとよい問いは次の3つです。
- ネットワークに層がたくさんあるとき、勾配はどうやって1層ずつ戻ってくるのか?
- なぜ
loss.backward()だけで、すべてのパラメータの勾配が一気に計算できるのか? - 連鎖律は複雑なネットワークの中で、どのように働いているのか?
この3つの疑問は、そのまま次の内容へ自然につながります。
このページを終えたら、この evidence card を残します。
- 関数
- 目的関数、損失、導関数、勾配、または連鎖律の式
- 計算
- 数値微分、勾配更新、または backprop の trace
- 出力
- slope、gradient vector、更新されたパラメータ、またはlossの変化
- 失敗確認
- 符号ミス、学習率が大きすぎる、局所的な傾きの誤解、または chain の破損
- 期待される成果
- パラメータがどう変わるかを示す計算 trace
| 概念 | 直感 |
|---|---|
| 勾配降下法 | 負の勾配方向へ少しずつ進んで最小点を目指す |
| 学習率 | 1回でどれだけ進むか(大きすぎると振動、小さすぎると遅い) |
| BGD | 全データで勾配を計算する(正確だが遅い) |
| Mini-batch SGD | 少量のデータで計算する(最もよく使う) |
| 局所最小値 | 全体最適ではないが、勾配が 0 の点 |
この節でいちばん持ち帰ってほしいこと
Section titled “この節でいちばん持ち帰ってほしいこと”- 勾配降下法のいちばん大事な直感は、「損失が下がる方向へ少しずつ更新する」こと
- 学習率は「1歩でどれだけ進むか」を決める
- モデル学習の本質は、「勾配を見る → 1歩進む → また見る」を繰り返すこと
手を動かして練習しよう
Section titled “手を動かして練習しよう”練習 1:学習率を調整する
Section titled “練習 1:学習率を調整する”4.3 節のコードを変更して、lr=0.001、0.01、0.1、0.5 で学習し、4本の損失曲線を比較して描いてみましょう。
練習 2:二次関数をゼロからフィットする
Section titled “練習 2:二次関数をゼロからフィットする”勾配降下法で y = ax² + bx + c をフィットし、最適な a、b、c を見つけてください。データは次のとおりです。
X = np.linspace(-3, 3, 100)rng = np.random.default_rng(seed=42)y = 0.5 * X**2 - 2 * X + 1 + rng.normal(size=100) * 0.5練習 3:2次元の勾配降下を可視化する
Section titled “練習 3:2次元の勾配降下を可視化する”f(x, y) = x² + 2y² について、(4, 3) から勾配降下法を行い、等高線図の上に下降軌跡を描いてみましょう。
参考実装と解説
- 学習率
0.001、0.01、0.1、0.5を比べると、0.001はかなり遅く、0.01や0.1は比較的安定し、0.5はスケールによって振動や発散を起こすことがあります。 - 二次関数フィットでは、学習されたパラメータはデータ生成値
a≈0.5、b≈-2、c≈1に近づきます。ただしノイズがあるため完全一致はしません。 f(x,y)=x^2+2y^2では、y 方向の勾配成分が4yなので、y 方向の更新が速くなります。経路は原点へ曲がっていくはずです。