9.2.1 推論ロードマップ:計画、行動、確認
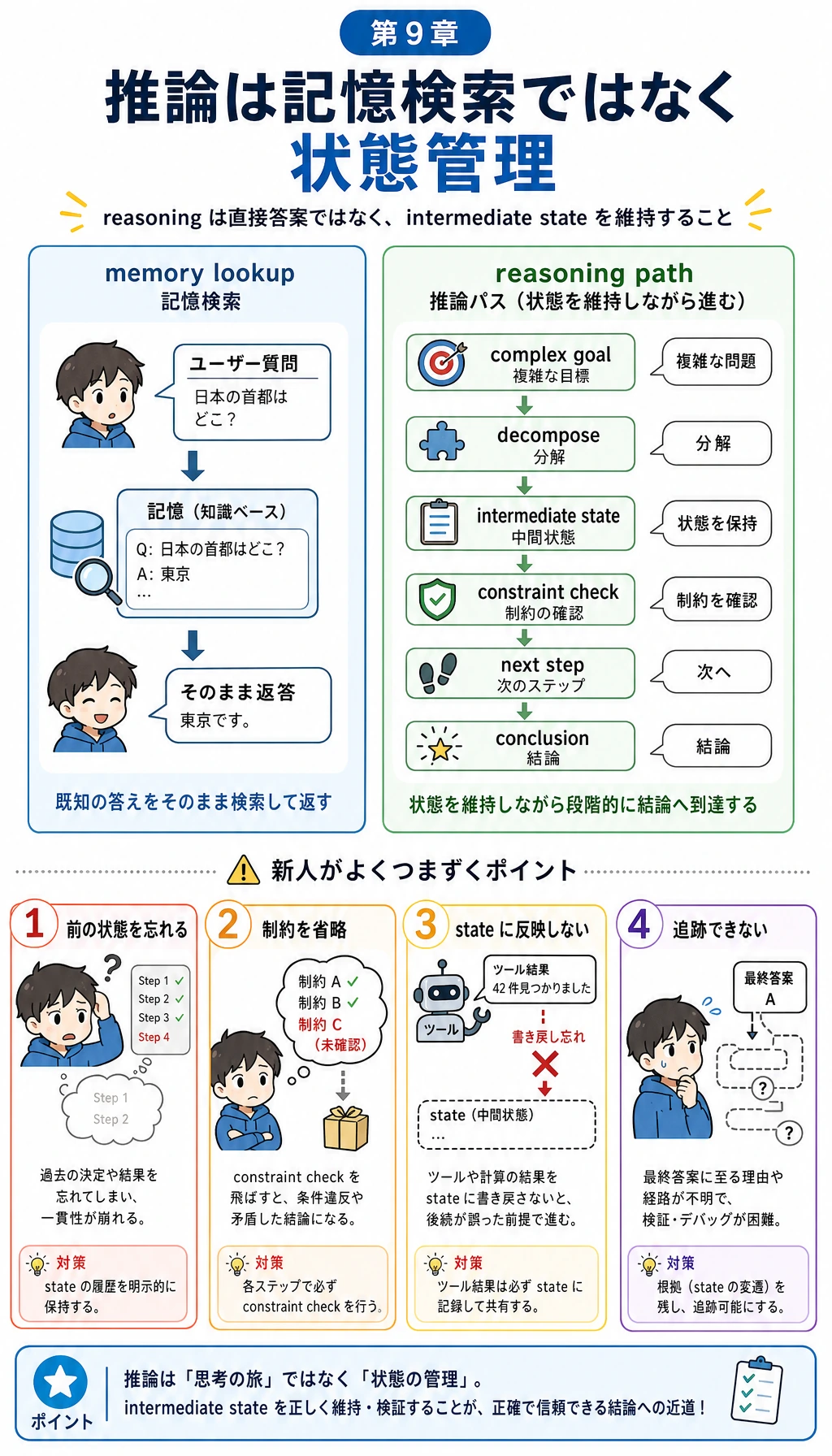
Agent の推論は長い回答ではありません。使える中間手順を作り、次に何をするか決め、計画がまだ有効か確認する力です。
まず計画ループを見る
Section titled “まず計画ループを見る”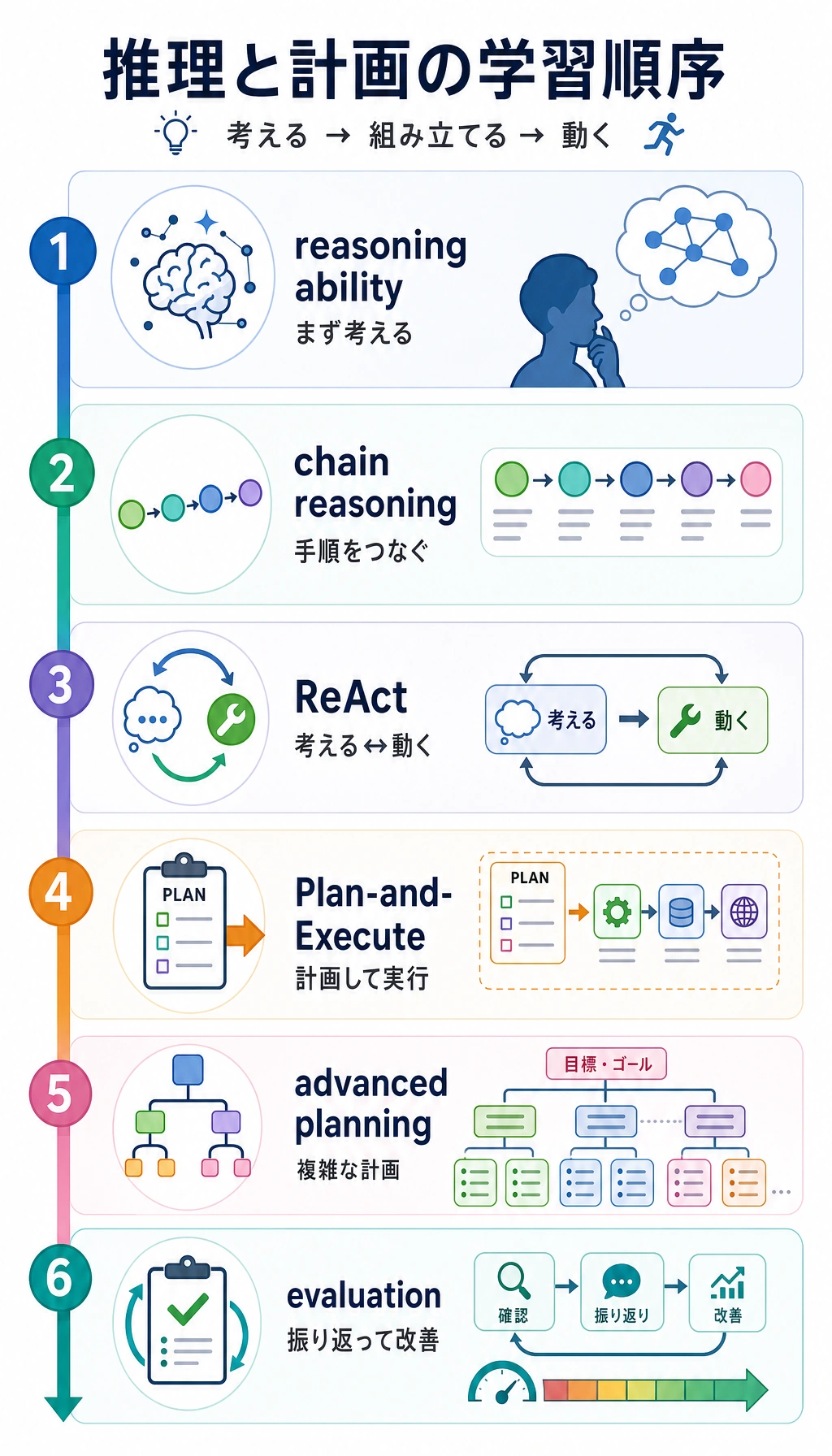
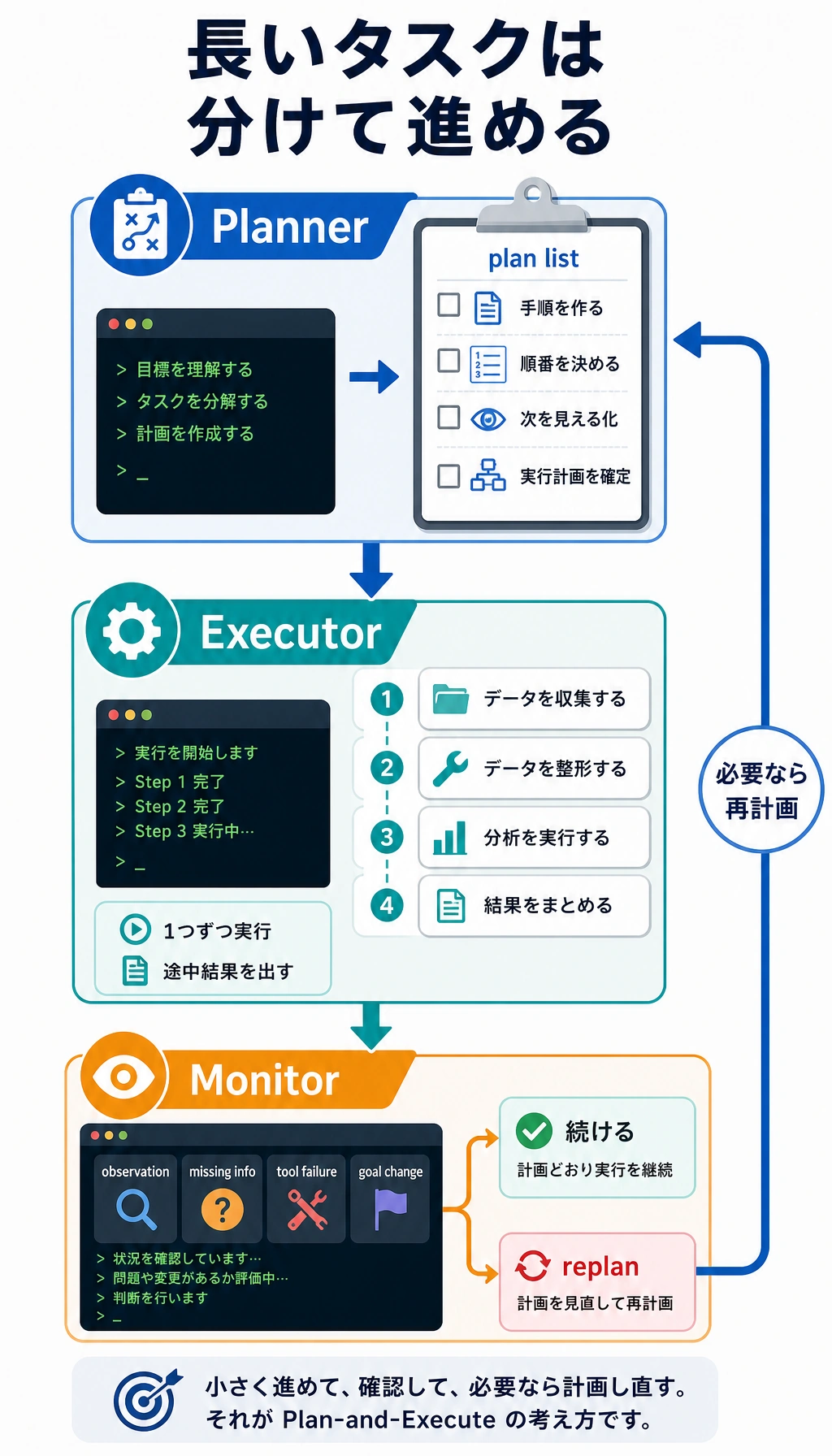
基本習慣は、1 ステップを計画し、実行し、結果を観察し、状態チェックポイントを残し、状況が変われば再計画することです。
計画チェックリストを動かす
Section titled “計画チェックリストを動かす”ツールを追加する前に、明示的な手順を作ります。出力できない計画は確認しにくいです。
task = "prepare a cited RAG demo answer"plan = ["inspect question", "retrieve sources", "draft answer", "check citations"]
print("task:", task)for index, step in enumerate(plan, start=1): print(f"{index}. {step}")print("checkpoint:", plan[-1])期待される出力:
task: prepare a cited RAG demo answer1. inspect question2. retrieve sources3. draft answer4. check citationscheckpoint: check citations良い planning は見えるものです。失敗を見つけやすくし、最後の文章の裏に隠さないようにします。
この順番で学ぶ
Section titled “この順番で学ぶ”| 手順 | 読む内容 | 実践アウトプット |
|---|---|---|
| 1 | LLM 推論 | 答えを知ることと、道筋を導くことを区別する |
| 2 | 連鎖推論 | 中間 state と self-check point を作る |
| 3 | ReAct | thought、action、observation、次の一手を交互に行う |
| 4 | Plan-and-Execute | タスクが大きいとき計画と実行を分ける |
| 5 | 高度な計画 | dependency、priority、rollback、replan を扱う |
| 6 | 推論評価 | 最終結果、経路品質、失敗タイプを採点する |
このページを終えたら、この証拠カードを残します。
- タスク目標
- Agent が解決しようとしていること
- 計画またはトレース
- 推論手順、計画、ReAct trace、または実行グラフ
- 観察
- 各アクションの後に何が変わったか
- 失敗確認
- 幻覚のステップ、古い観測、ループ、または未検証の結論
- 評価アクション
- 期待結果と比較して計画を修正する
計画の失敗理由を、分解不足、ツール選択ミス、古い観察、チェックポイント不足、弱い最終検証として説明できれば、この章は合格です。
出口ミニプロジェクトは、1 つのタスクに対する見える推論 trace です:計画手順、観察、再計画、最終回答を残します。
確認の考え方と解説
- 合格レベルの答えでは、agent loop を goal、plan、tool call、observation、memory/state update、stop condition として説明します。
- 証拠には、最終回答だけでなく、別の開発者が確認できる trace を残します。
- tool schema、permission boundary、retry、evaluation case、人間レビューなど、安全性または信頼性の制御を1つ説明できれば十分です。