9.1.1 Agent 基础路线图:目标、状态、行动
Agent 不是一个模型名称,而是一种系统模式:围绕目标组织模型、工具、状态、记忆和反馈,让系统能持续推进任务。
先看单 Agent 闭环
Section titled “先看单 Agent 闭环”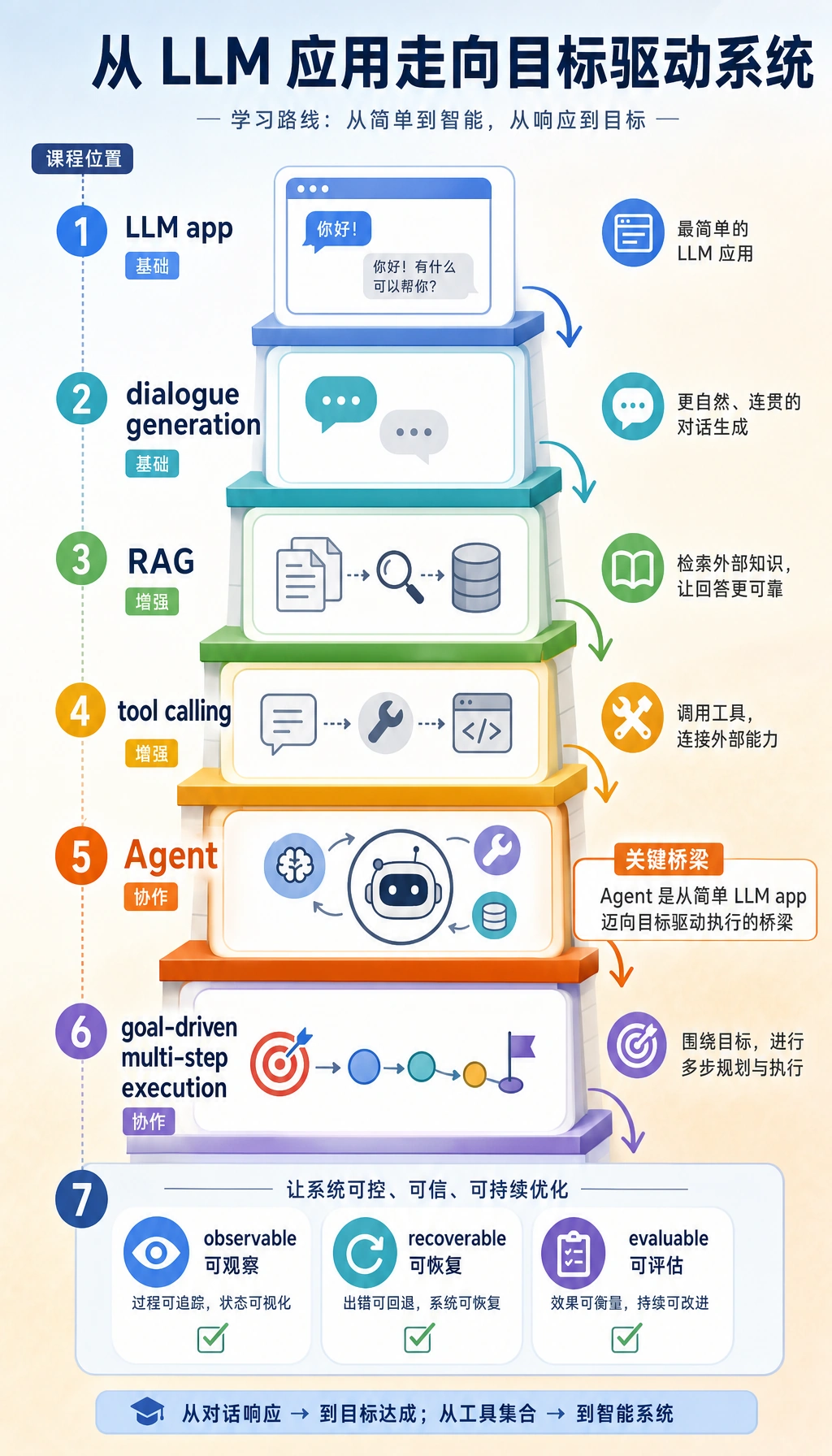
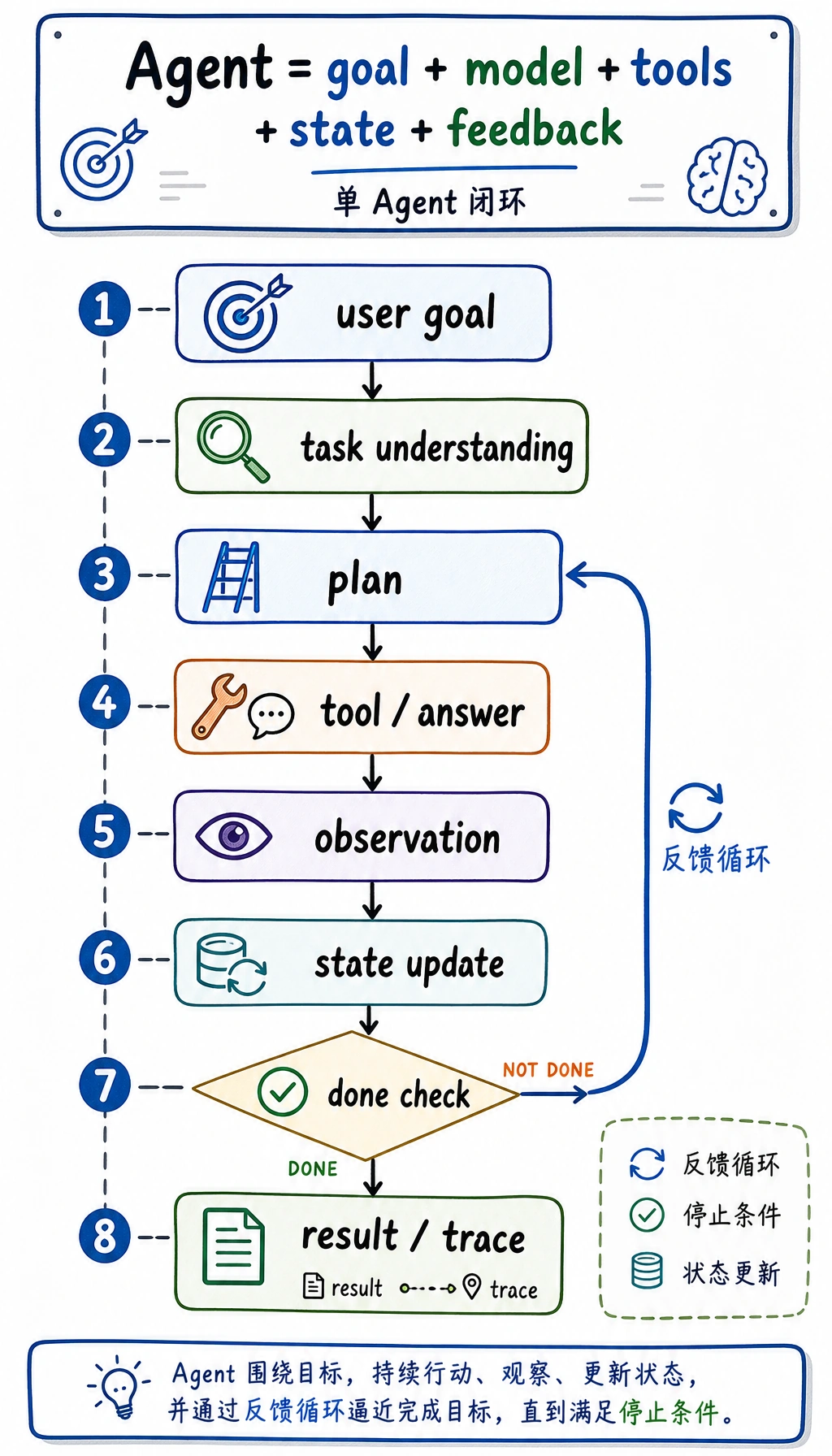
普通聊天机器人回答一次,工作流执行固定步骤。Agent 可以计划、行动、观察、更新状态,并在目标未完成时继续。
跑一个极小 Agent 状态闭环
Section titled “跑一个极小 Agent 状态闭环”这个脚本还不会调用模型,但会展示 Agent 可调试前至少需要哪些状态。
goal = "summarize RAG citation rules"state = {"steps": [], "done": False}
for action in ["plan", "search_docs", "summarize"]: state["steps"].append(action)
state["done"] = True
print("goal:", goal)print("steps:", " -> ".join(state["steps"]))print("done:", state["done"])预期输出:
goal: summarize RAG citation rulessteps: plan -> search_docs -> summarizedone: True如果一个演示不能展示目标、状态、行动、观察和停止条件,先把它称为大模型应用,而不是 Agent。
按这个顺序学
Section titled “按这个顺序学”| 步骤 | 阅读 | 实操产出 |
|---|---|---|
| 1 | 什么是 Agent | 比较聊天机器人、工作流、RAG 应用和 Agent |
| 2 | 发展历史 | 理解为什么 LLM 让 Agent 系统重新升温 |
| 3 | 能力等级 | 把回答、检索、工具、规划、记忆、协作放到同一条能力阶梯 |
| 4 | 系统架构 | 画出目标、状态、规划器、工具、记忆、观察和执行器 |
| 5 | RL 到 Agent 的突破 | 连接行动、奖励、反馈和规划 |
学完这一页,至少保留这张证据卡:
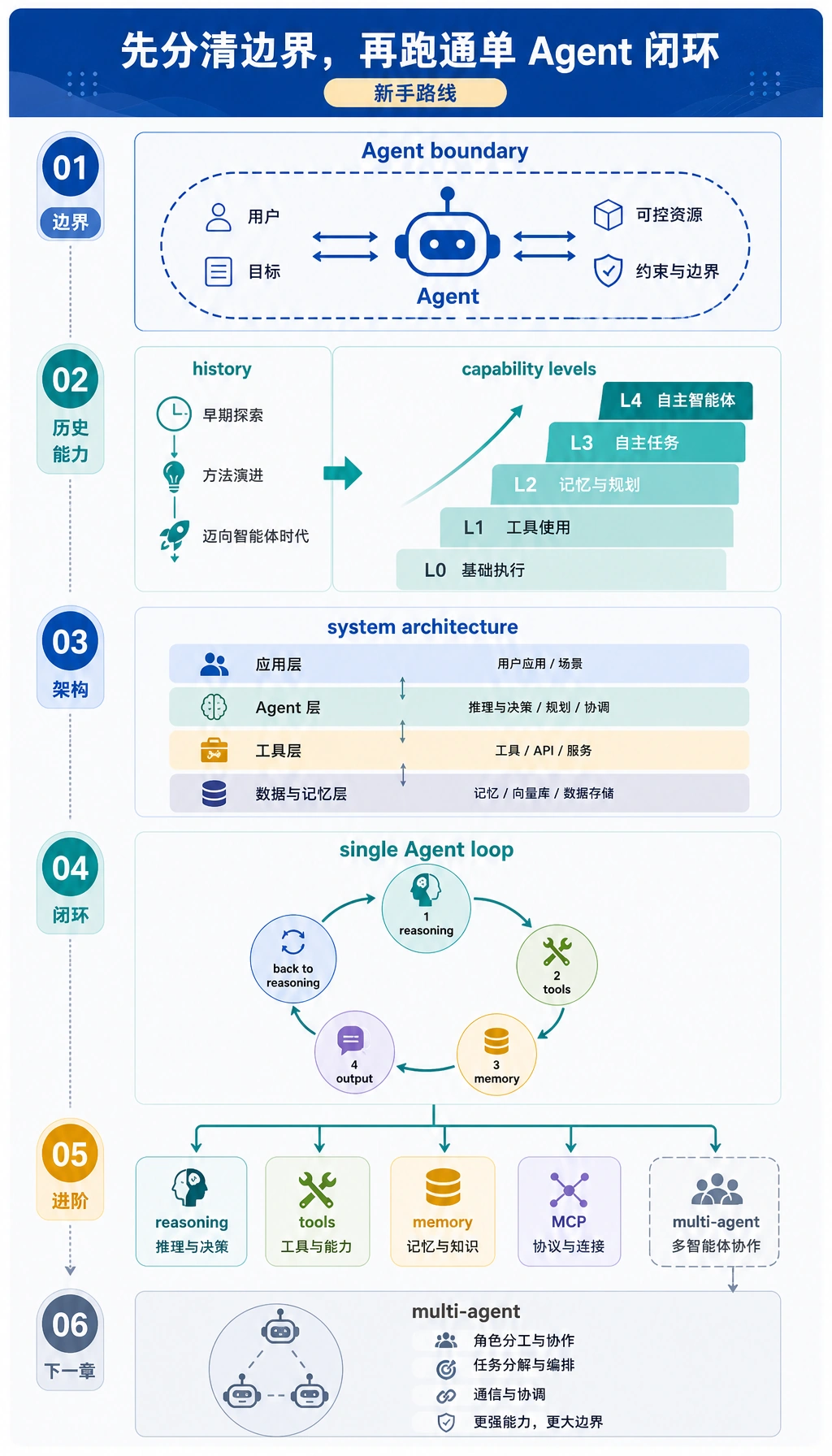
- 智能体边界
- 这与聊天机器人或固定工作流有何不同
- 目标状态动作
- 目标、当前状态、下一步动作、观察
- 架构组成
- 规划器、工具、记忆、护栏、评估器
- 失败检查
- 过度自主、目标模糊、状态缺失或没有 trace
- 下一步动作
- 构建最小可追踪的单智能体循环
如果你能画出一个单 Agent 闭环,并解释为什么单 Agent 稳定性要先于多 Agent 协作,就通过了本章。
本章出口小项目是一份研究助手 Agent trace:一个目标、一个计划、至少一个工具决策、一次观察、一个停止条件和一个最终回答。
检查思路与讲解
- 合格答案要描述 agent 循环:目标、计划、工具调用、观察结果、记忆或状态更新,以及停止条件。
- 证据应包含另一个开发者可以检查的 trace,而不只是最终回答。
- 自检时要能说出一个安全或可靠性控制,例如工具 schema、权限边界、重试、评估用例或人工复核点。