10 计算机视觉(方向选修)
这一选修章回答一个简单问题:模型“看见一张图”到底是什么意思? 先从像素开始,再按输出粒度逐步深入:识别整张图、定位目标、分割像素,最后连接 OCR、视频或多模态系统。
如果你的主线是 LLM 应用和 Agent,可以之后再补;如果你关心 OCR、工业检测、医学影像、视觉搜索或多模态产品,就建议系统学习。
按输出粒度看视觉任务
Section titled “按输出粒度看视觉任务”
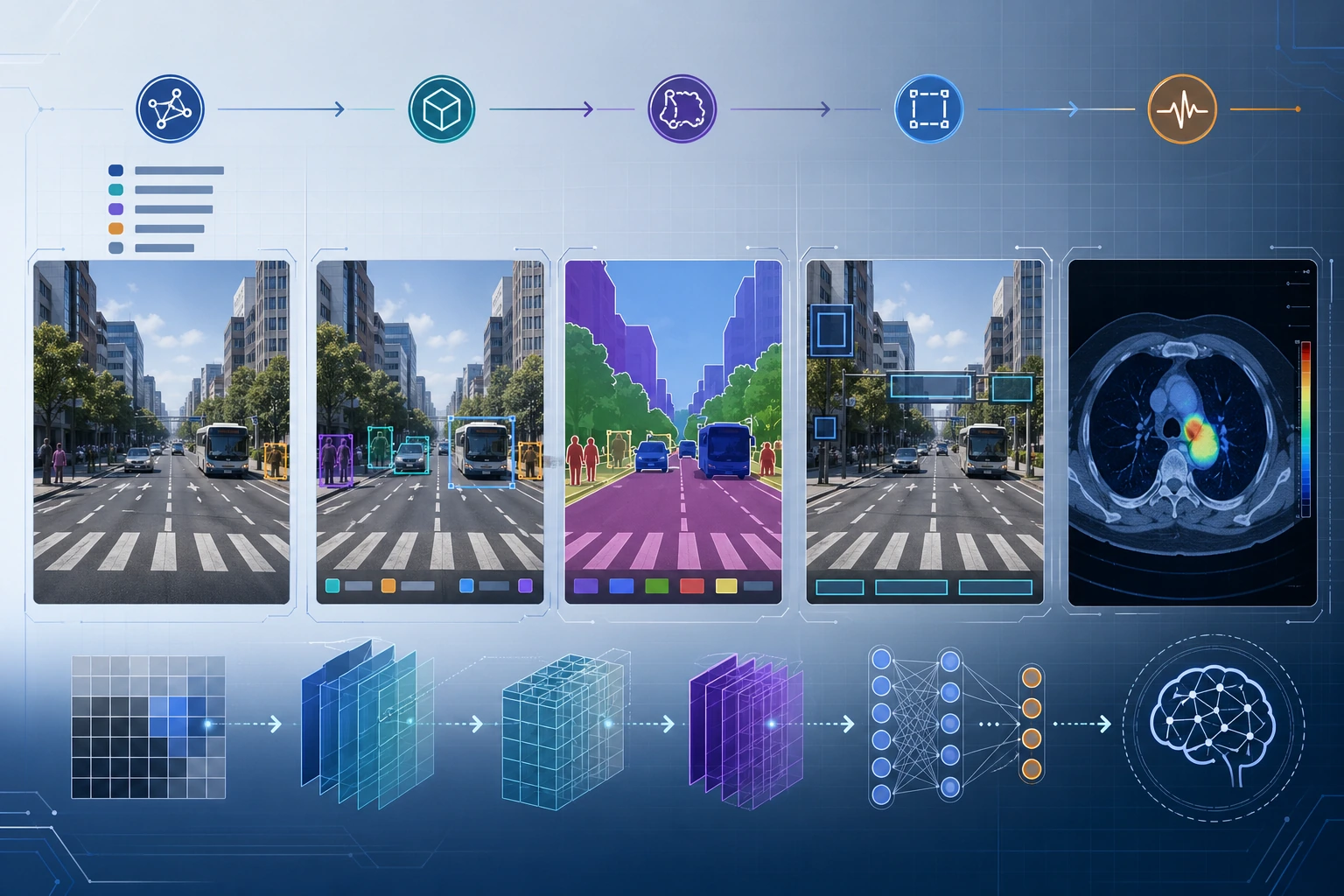
对同一张图问三个问题:
| 问题 | 任务 | 输出 |
|---|---|---|
| 这张图主要是什么? | 分类 | 一个或多个标签 |
| 每个物体在哪里? | 检测 | 框、标签、置信度 |
| 哪些像素属于哪个物体或区域? | 分割 | mask 或像素类别 |
| 能提取什么文字或视觉含义? | OCR / 视觉理解 | 文本、表格、描述、答案 |
学习顺序与任务表
Section titled “学习顺序与任务表”先理解输出类型,再做项目。同一张图可以变成多种任务。
| 步骤 | 阅读内容 | 要动手做什么 | 留下什么证据 |
|---|---|---|---|
| 10.1 | 图像基础与 OpenCV | 检查像素、通道、缩放、灰度、边缘 | 输入图、处理后输出 |
| 10.2 | 图像分类 | 运行或训练一个小分类器 | 标签、accuracy/F1、错误图片 |
| 10.3 | 目标检测 | 理解框、置信度、IoU、mAP、YOLO | 预测框和阈值记录 |
| 10.4 | 图像分割 | 理解 mask 和像素级标签 | mask 可视化和 IoU/Dice 记录 |
| 10.5 | 进阶专题 | 只在需要时选择 OCR、视频、人脸、3D 或医学方向 | 方向说明和场景边界 |
| 10.6 | 阶段项目 | 运行 10.6.4 实操:构建一个可复现的视觉迷你流水线 | 生成图像、mask、框、指标、失败报告 |
第一个可运行循环:零依赖检查像素
Section titled “第一个可运行循环:零依赖检查像素”这个零依赖小实验会创建一张很小的彩色图,把它转成灰度图,并保存成大多数图片查看器可打开的文件。它要教的核心是:图像就是有结构的数字数据。
新建 ch10_pixel_lab.py,用 Python 3.10 或更新版本运行。
from pathlib import Path
width, height = 8, 8
pixels = [ [(x * 32, y * 32, 128) for x in range(width)] for y in range(height)]
gray = [ [round(0.299 * r + 0.587 * g + 0.114 * b) for r, g, b in row] for row in pixels]
ppm_body = "\n".join(" ".join(f"{r} {g} {b}" for r, g, b in row) for row in pixels)pgm_body = "\n".join(" ".join(str(value) for value in row) for row in gray)
Path("synthetic_rgb.ppm").write_text(f"P3\n{width} {height}\n255\n{ppm_body}\n")Path("synthetic_gray.pgm").write_text(f"P2\n{width} {height}\n255\n{pgm_body}\n")
print("size:", (width, height))print("channels:", 3)print("top_left_rgb:", pixels[0][0])print("center_gray:", gray[height // 2][width // 2])print("saved:", "synthetic_rgb.ppm", "synthetic_gray.pgm")预期输出:
size: (8, 8)channels: 3top_left_rgb: (0, 0, 128)center_gray: 128saved: synthetic_rgb.ppm synthetic_gray.pgm操作提示:修改 width、height 或 RGB 公式。保存的图像改变了,就说明你已经在做图像预处理。后续章节会把这个小实验替换成 OpenCV、Pillow、PyTorch,以及检测或分割模型。
如何读这个输出
Section titled “如何读这个输出”size和channels说明模型看到图像之前,数据本身是什么形状。top_left_rgb是真实像素值,不是对图片的文字描述。center_gray证明预处理已经把 RGB 数据变成了一个灰度数值。- 保存下来的文件就是证据。如果不能展示处理前后文件,后面很难调试预处理是否正确。
| 层级 | 你能证明什么 |
|---|---|
| 最低通过 | 能运行像素实验,并解释图像尺寸、通道、RGB 值、灰度转换和保存输出。 |
| 项目可用 | 能按输出选择任务,保留原图、处理图和预测图,报告正确指标,并保存失败样本。 |
| 深度检查 | 换架构前,能把错误追到数据、标注、预处理、模型、阈值、指标或部署限制。 |
调试视觉结果
Section titled “调试视觉结果”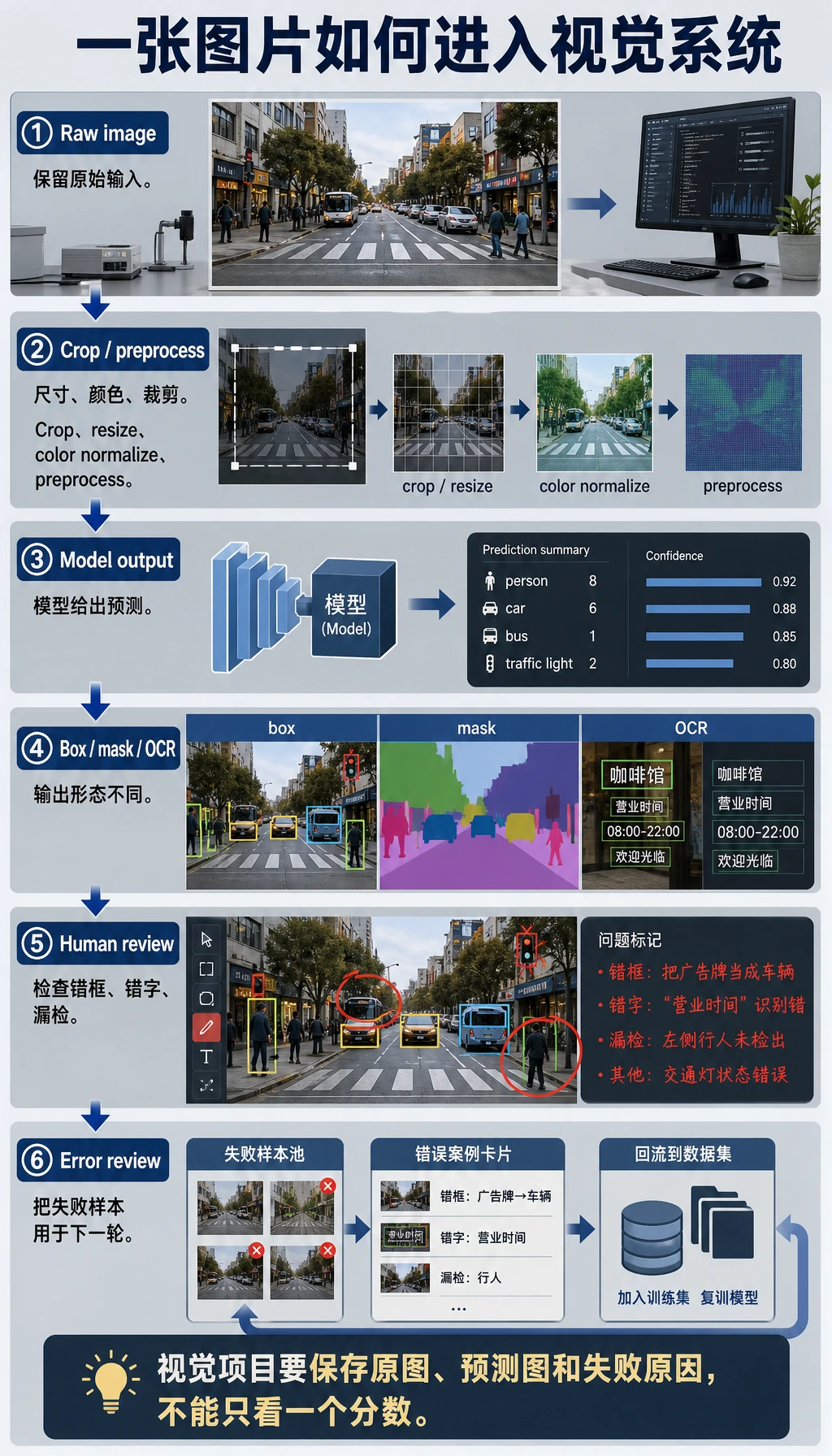
视觉模型出错时,先检查输入和标签,再怀疑模型架构。
| 现象 | 先打印或可视化什么 | 可能修复 |
|---|---|---|
| 分类不稳定 | 误判图片和类别数量 | 清洗数据、平衡类别、调整增强 |
| 小目标漏检 | 图片分辨率、框、置信度阈值 | 改进标注、提高分辨率、调阈值 |
| 分割边界粗糙 | mask 叠加到原图的效果 | 改进标注,使用合适的 IoU/Dice 指标 |
| 演示图好,真实图差 | 光照、角度、背景、相机来源 | 补真实样本和场景说明 |
学完这一页,至少保留这张证据卡:
- 任务输出
- 分类标签、检测框、分割掩膜、OCR 文本或视频事件
- 工件
- 原始图像、处理后图像、预测叠加图、指标文件和失败样本
- 指标
- 准确率/F1、mAP、IoU、Dice、延迟或场景特定审查分数
- 失败检查
- 数据质量、标签错误、预处理不匹配、阈值或部署约束
- 期望产出
- 一个可复现的运行文件夹,包含可视化输出和简短失败报告
- 还没检查数据质量就追模型名字。
- 只报 accuracy,却不保存错误图片。
- 混淆分类、检测和分割的输出。
- 使用会改变标签含义的数据增强。
- 忽略图像尺寸、延迟和设备内存等部署限制。
离开这个选修章前,你应该能做到:
- 按输出解释分类、检测、分割、OCR 和视觉理解;
- 运行像素小实验,并解释图像尺寸、通道、RGB 值和灰度值;
- 保留输入图、处理图、预测图、指标和失败样本;
- 选择 accuracy/F1、mAP、IoU 或 Dice 等合适指标;
- 跑通可复现视觉迷你流水线,并写一段失败分析。
可打印清单见 10.0 学习检查表。如果想直接做项目,从 10.6.4 实操:构建一个可复现的视觉迷你流水线 开始。