6.4.4 Sequence Modeling in Practice
Learning Goals
Section titled “Learning Goals”- Convert a continuous time series into supervised learning samples.
- Keep LSTM inputs in
[batch, seq_len, input_size]. - Split validation data in time order to avoid future leakage.
- Train an LSTM forecaster and compare it with a naive baseline.
- Read validation loss and prediction samples.
The Core Workflow
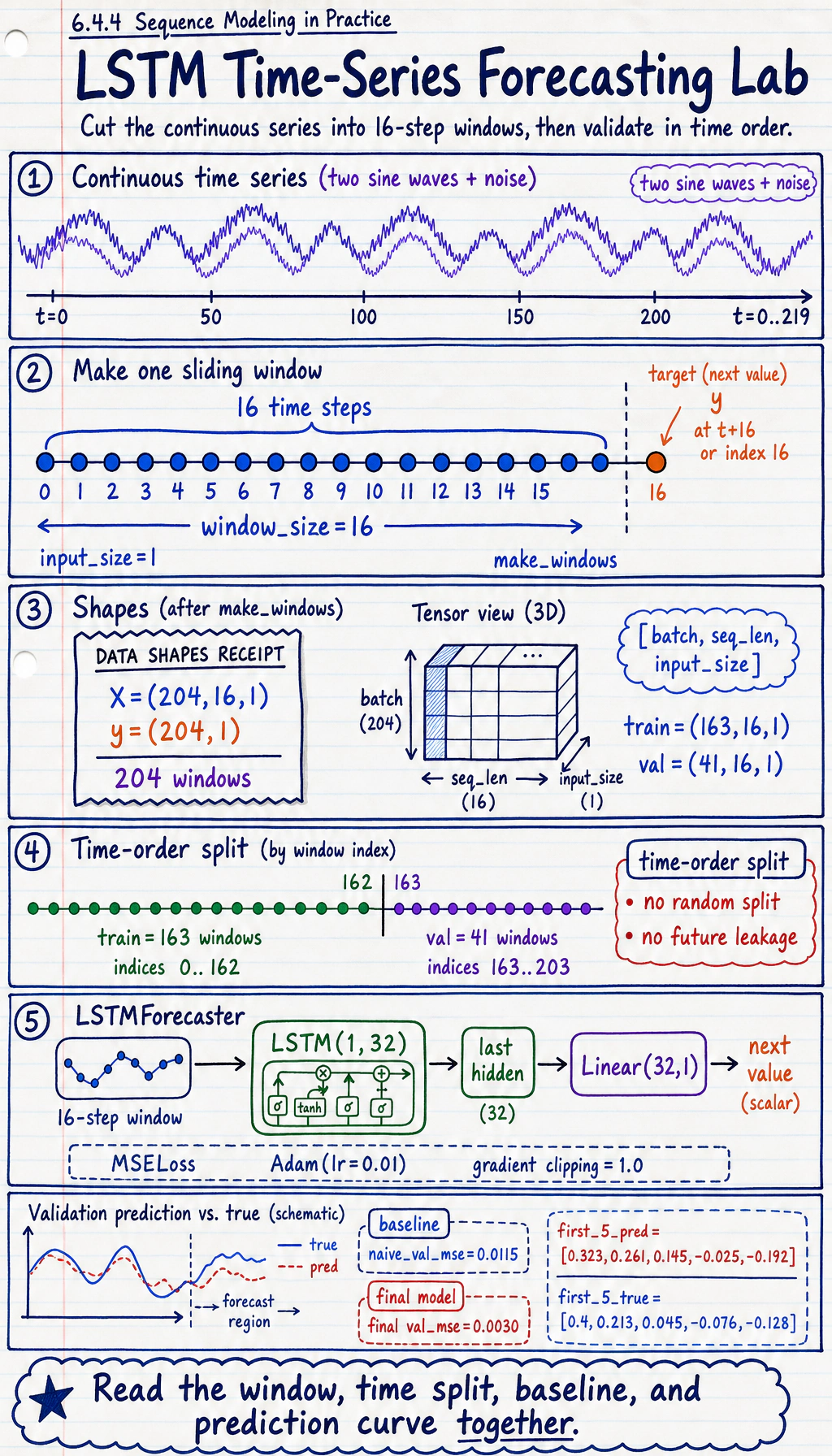
Section titled “The Core Workflow”For time series, avoid random splitting by default. If future points leak into training, validation becomes too optimistic.
Sliding Window in One Minute
Section titled “Sliding Window in One Minute”If window_size = 3:
series: [1, 2, 3, 4, 5, 6]
X[0] = [1, 2, 3] -> y[0] = 4X[1] = [2, 3, 4] -> y[1] = 5X[2] = [3, 4, 5] -> y[2] = 6That is how a continuous sequence becomes training rows.
Full Lab: LSTM Forecasting
Section titled “Full Lab: LSTM Forecasting”The synthetic series combines two waves and noise. This is still small, but it is closer to real data than a perfect sine wave.
import numpy as npimport torchfrom torch import nn
np.random.seed(42)torch.manual_seed(42)
def make_windows(series, window_size): X, y = [], [] for i in range(len(series) - window_size): X.append(series[i : i + window_size]) y.append(series[i + window_size]) X = torch.tensor(np.array(X), dtype=torch.float32).unsqueeze(-1) y = torch.tensor(np.array(y), dtype=torch.float32).unsqueeze(-1) return X, y
t = np.arange(0, 220)series = ( np.sin(t * 0.12) + 0.25 * np.sin(t * 0.03) + np.random.randn(len(t)) * 0.04).astype(np.float32)
window_size = 16X, y = make_windows(series, window_size)
split = int(len(X) * 0.8)X_train, X_val = X[:split], X[split:]y_train, y_val = y[:split], y[split:]
print("window_lab")print("X:", tuple(X.shape), "y:", tuple(y.shape))print("train:", tuple(X_train.shape), "val:", tuple(X_val.shape))
naive_val = ((X_val[:, -1, :] - y_val) ** 2).mean().item()print("naive_val_mse:", round(naive_val, 4))
class LSTMForecaster(nn.Module): def __init__(self, hidden_size=32): super().__init__() self.lstm = nn.LSTM(1, hidden_size, batch_first=True) self.fc = nn.Linear(hidden_size, 1)
def forward(self, x): out, _ = self.lstm(x) return self.fc(out[:, -1, :])
model = LSTMForecaster(32)loss_fn = nn.MSELoss()optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
for epoch in range(1, 121): model.train() pred = model(X_train) loss = loss_fn(pred, y_train)
optimizer.zero_grad() loss.backward() torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0) optimizer.step()
if epoch == 1 or epoch % 30 == 0: model.eval() with torch.no_grad(): val_loss = loss_fn(model(X_val), y_val) print(f"epoch={epoch:03d} train_mse={loss.item():.4f} val_mse={val_loss.item():.4f}")
model.eval()with torch.no_grad(): val_pred = model(X_val) print("first_5_pred:", [round(v, 3) for v in val_pred[:5, 0].tolist()]) print("first_5_true:", [round(v, 3) for v in y_val[:5, 0].tolist()])Expected output:
window_labX: (204, 16, 1) y: (204, 1)train: (163, 16, 1) val: (41, 16, 1)naive_val_mse: 0.0115epoch=001 train_mse=0.5168 val_mse=0.4633epoch=030 train_mse=0.0049 val_mse=0.0046epoch=060 train_mse=0.0032 val_mse=0.0035epoch=090 train_mse=0.0029 val_mse=0.0032epoch=120 train_mse=0.0028 val_mse=0.0030first_5_pred: [0.323, 0.261, 0.145, -0.025, -0.192]first_5_true: [0.4, 0.213, 0.045, -0.076, -0.128]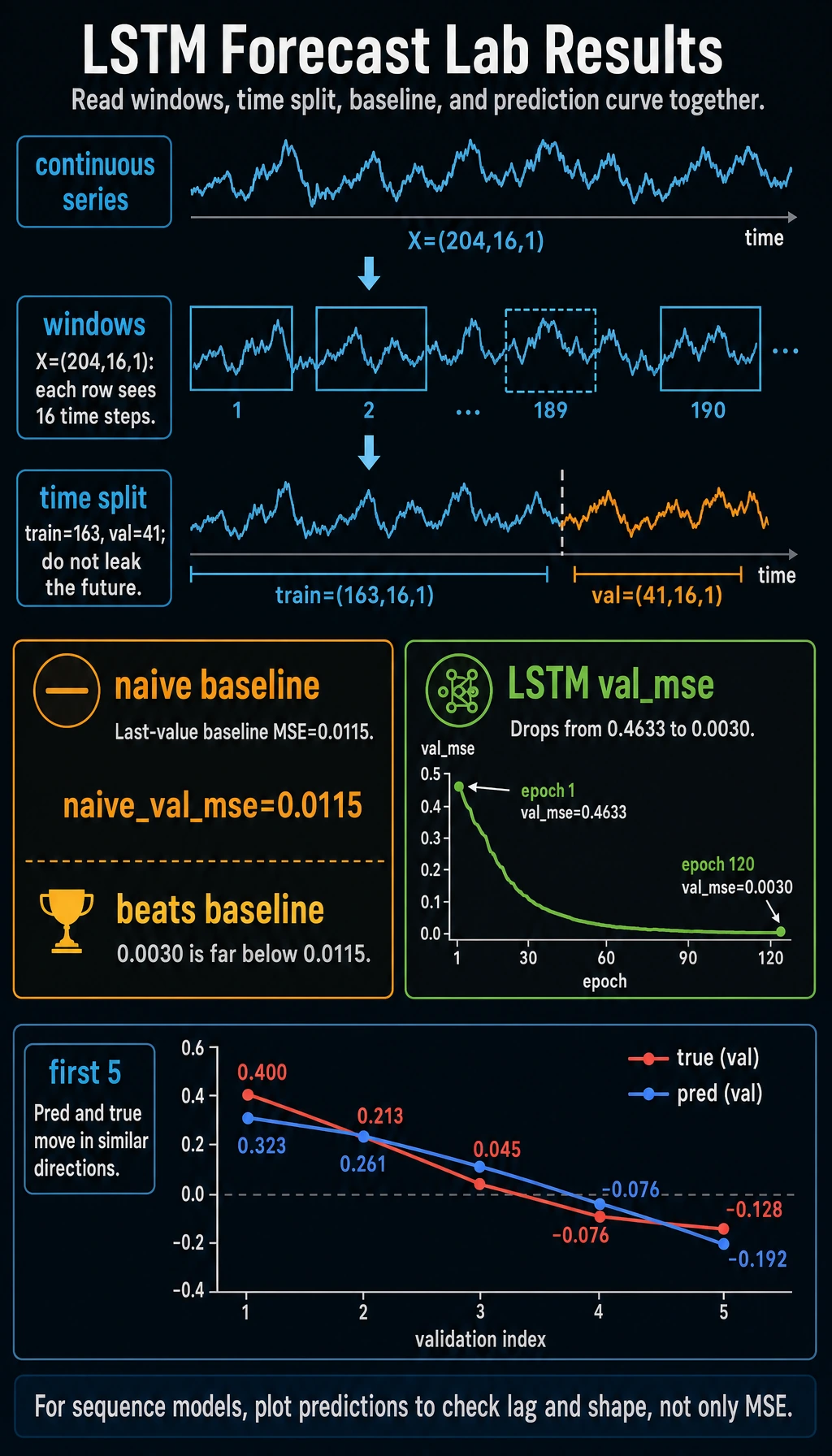
Read the Output
Section titled “Read the Output”| Output | Meaning |
|---|---|
X: (204, 16, 1) | 204 windows, 16 time steps, 1 feature per step |
train: (163, 16, 1) | first 80% of windows used for training |
val: (41, 16, 1) | later windows used for validation |
naive_val_mse | baseline: predict the next value as the last observed value |
val_mse | LSTM validation error |
first_5_pred vs first_5_true | quick sanity check for direction and scale |
The LSTM beats the naive baseline in this run (0.0030 vs 0.0115). That matters: a model should beat a simple baseline before you trust it.
Evidence to Keep
Section titled “Evidence to Keep”For sequence forecasting, keep a baseline comparison:
- Window Size
- 16
- Split Rule
- train first 80%, validate later 20%
- Naive Val Mse
- 0.0115
- Model Val Mse
- 0.0030
- Plot Check
- predictions do not merely lag or flatten
The most important evidence is not that the LSTM has a low loss. It is that it beats a simple, honest baseline without leaking future data.
Why Use Gradient Clipping?
Section titled “Why Use Gradient Clipping?”RNN-style models can sometimes produce large gradients. This line caps the total gradient norm:
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)It is not always required, but it is a good practical safety habit in sequence models.
What to Plot in a Notebook
Section titled “What to Plot in a Notebook”In a notebook, add:
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 4))plt.plot(y_val.squeeze(-1).numpy(), label="true")plt.plot(val_pred.squeeze(-1).numpy(), label="pred")plt.legend()plt.grid(True, alpha=0.3)plt.show()Look for:
- lag: predictions follow the shape but arrive late;
- flatline: model predicts an average value;
- missed peaks: window is too short or model too weak;
- noisy prediction: learning rate, data noise, or overfitting issues.
Common Pitfalls
Section titled “Common Pitfalls”| Pitfall | Why it hurts | Fix |
|---|---|---|
| random train/val split | future leaks into training | split in time order |
| window too short | model cannot see enough context | try larger window_size |
| window too long | harder optimization, more noise | compare validation loss |
| no baseline | model may look good but be trivial | compare with naive last-value baseline |
| only checking MSE | trend may lag or flatten | plot prediction curves |
| no scaling on real data | large ranges destabilize training | normalize using train statistics |
From Toy Series to Real Projects
Section titled “From Toy Series to Real Projects”Real sequence projects may use:
- multiple features per step;
- missing-value handling;
- normalization based only on training data;
- rolling-origin validation;
- GRU, Temporal CNN, Transformer, or statistical baselines;
- business metrics, not only MSE.
But the workflow stays the same: define windows, protect time order, compare baselines, and inspect predictions.
Exercises
Section titled “Exercises”- Change
window_sizeto8and32. Which validation MSE is better? - Replace
nn.LSTMwithnn.GRU. Does it train faster or differently? - Remove gradient clipping. Does training remain stable?
- Add a second feature, such as
np.cos(t * 0.12). - Implement a rolling forecast that feeds predictions back into the next window.
Reference implementation and walkthrough
- A very small window can miss useful context; a very large window may add optimization cost. The best choice is the one with lower validation MSE and stable plots.
- GRU may train slightly faster because it has a lighter state design. Whether it is better must be judged by validation MSE and forecast shape.
- Without clipping, training may still work on this small task, but spikes or
nangradients become more likely as the model or sequence length grows. - Adding a second feature changes
input_sizefrom1to2and each window must include both features. The target definition should stay clear. - Rolling forecasts compound errors because each prediction becomes part of the next input. Compare one-step validation with rolling validation to see this drift.
Key Takeaways
Section titled “Key Takeaways”- Sliding windows turn a continuous sequence into supervised learning samples.
- Time-based validation prevents future leakage.
- A naive baseline is required for meaningful evaluation.
- LSTM inputs use
[batch, seq_len, input_size]. - Plots and prediction samples often reveal issues that a single loss value hides.